Espaces vectoriels#
L’algèbre linéaire est le cœur des mathématiques modernes.
— Jean Dieudonné
Définition et axiomes#
Définition 134 (Espace vectoriel)
Soit \(\mathbb{K}\) un corps (\(\mathbb{K} = \mathbb{R}\) ou \(\mathbb{C}\)). Un \(\mathbb{K}\)-espace vectoriel est un ensemble \(E\) muni d’une addition \(+ : E \times E \to E\) et d’une multiplication externe \(\cdot : \mathbb{K} \times E \to E\) vérifiant, pour tout \(u, v, w \in E\) et \(\lambda, \mu \in \mathbb{K}\) :
Axiome |
Formule |
|---|---|
\((E, +)\) groupe abélien |
\(u + (v + w) = (u+v) + w\), \(u + v = v + u\), \(\exists\, 0_E\), \(\exists -u\) |
Distributivité |
\(\lambda(u+v) = \lambda u + \lambda v\), \((\lambda+\mu)u = \lambda u + \mu u\) |
Associativité mixte |
\((\lambda\mu)u = \lambda(\mu u)\) |
Neutralité |
\(1_{\mathbb{K}} \cdot u = u\) |
Les éléments de \(E\) sont des vecteurs, ceux de \(\mathbb{K}\) des scalaires.
Proposition 218 (Propriétés immédiates)
Pour tout \(u \in E\) et \(\lambda \in \mathbb{K}\) :
\(0_{\mathbb{K}} \cdot u = 0_E\)
\(\lambda \cdot 0_E = 0_E\)
\((-1) \cdot u = -u\)
\(\lambda u = 0_E \implies \lambda = 0\) ou \(u = 0_E\)
Proof. \(0_{\mathbb{K}} \cdot u = (0+0)u = 0u + 0u\), donc par simplification \(0u = 0_E\).
Si \(\lambda \neq 0\) : \(u = 1 \cdot u = (\lambda^{-1}\lambda)u = \lambda^{-1}(\lambda u) = \lambda^{-1} 0_E = 0_E\).
Exemple 76
Espaces vectoriels fondamentaux :
Espace |
Corps |
Dimension |
|---|---|---|
\(\mathbb{K}^n\) |
\(\mathbb{K}\) |
\(n\) |
\(\mathcal{M}_{n,p}(\mathbb{K})\) |
\(\mathbb{K}\) |
\(np\) |
\(\mathbb{K}_n[X]\) (polynômes \(\deg \leq n\)) |
\(\mathbb{K}\) |
\(n+1\) |
\(\mathbb{K}[X]\) (tous les polynômes) |
\(\mathbb{K}\) |
\(+\infty\) |
\(\mathcal{C}^0(I, \mathbb{K})\) (fonctions continues) |
\(\mathbb{K}\) |
\(+\infty\) |
\(\mathbb{C}\) vu comme \(\mathbb{R}\)-ev |
\(\mathbb{R}\) |
\(2\) |
Sous-espaces vectoriels#
Définition 135 (Sous-espace vectoriel)
\(F \subseteq E\) est un sous-espace vectoriel (sev) de \(E\) s’il est non vide et stable par combinaison linéaire :
Proof. Justification de l’équivalence avec la définition complète La stabilité par combinaison linéaire donne la stabilité par addition (prendre \(\lambda = 1\)) et par multiplication scalaire (prendre \(v = 0_E\), obtenu de \(u - u\) avec \(\lambda = -1\)). Tous les autres axiomes sont hérités de \(E\).
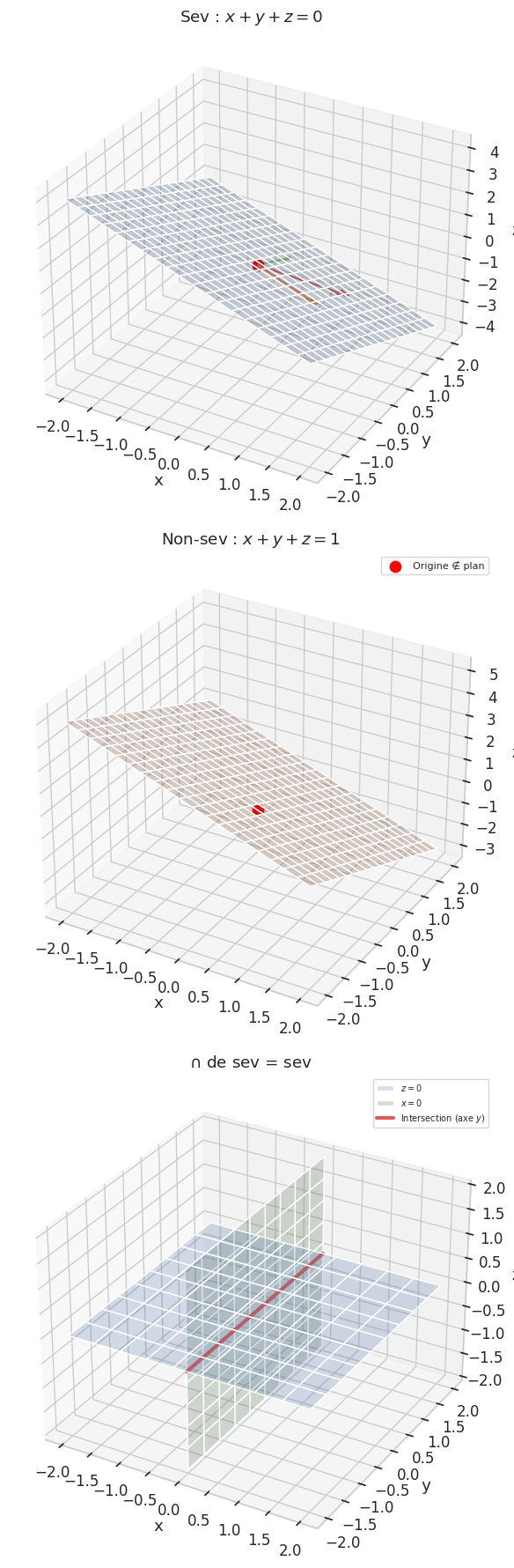
Exemple 77
\(\{(x,y,z) \in \mathbb{R}^3 \mid x+y+z = 0\}\) : sev (plan par l’origine)
\(\{(x,y) \in \mathbb{R}^2 \mid x+y = 1\}\) : pas un sev (ne contient pas \(0\))
\(\mathbb{K}_n[X] \subset \mathbb{K}[X]\) : sev
Fonctions paires de \(\mathcal{C}^0(\mathbb{R})\) : sev
Solutions d’une EDL homogène \(y'' + py' + qy = 0\) : sev de \(\mathcal{C}^2(I)\)
Proposition 219 (Opérations sur les sev)
L”intersection \(\bigcap_{i \in I} F_i\) de sev est un sev.
La réunion de deux sev n’est en général pas un sev.
Proof. Intersection. \(0_E\) appartient à chaque \(F_i\). Si \(u, v \in \bigcap F_i\) et \(\lambda \in \mathbb{K}\), alors pour chaque \(i\), \(u, v \in F_i\), donc \(\lambda u + v \in F_i\). D’où \(\lambda u + v \in \bigcap F_i\).
Contre-exemple pour la réunion. Les axes \(F_1 = \mathbb{R} e_1\) et \(F_2 = \mathbb{R} e_2\) de \(\mathbb{R}^2\) sont des sev, mais \(e_1 + e_2 \notin F_1 \cup F_2\).
Combinaisons linéaires et sous-espace engendré#
Définition 136 (Combinaison linéaire et sous-espace engendré)
Une combinaison linéaire de \((v_1, \ldots, v_p)\) est tout vecteur \(\sum_{k=1}^p \lambda_k v_k\) avec \(\lambda_k \in \mathbb{K}\).
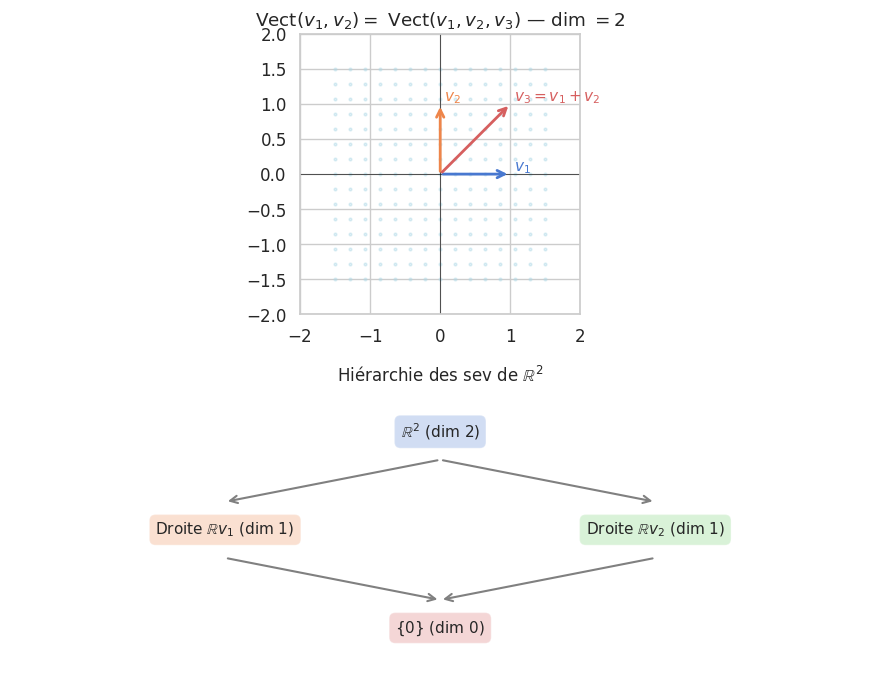
Le sous-espace engendré est \(\text{Vect}(v_1, \ldots, v_p) = \left\{\sum_{k=1}^p \lambda_k v_k \mid \lambda_k \in \mathbb{K}\right\}\).
C’est le plus petit sev contenant \(\{v_1, \ldots, v_p\}\), égal à l’intersection de tous les sev contenant ces vecteurs.
Somme et somme directe#
Définition 137 (Somme de sev)
La somme de sev \(F_1, \ldots, F_p\) est
C’est le plus petit sev contenant \(F_1 \cup \cdots \cup F_p\).
Définition 138 (Somme directe)
La somme est directe, notée \(F_1 \oplus \cdots \oplus F_p\), si toute décomposition \(u_1 + \cdots + u_p = 0\) avec \(u_i \in F_i\) implique \(u_i = 0\) pour tout \(i\).
Équivalemment : tout vecteur de la somme se décompose de manière unique.
Proposition 220 (Caractérisation de la somme directe (deux sev))
\(F + G\) est directe \(\iff\) \(F \cap G = \{0_E\}\).
Proof. \((\Rightarrow)\) Soit \(u \in F \cap G\). Alors \(0 = u + (-u)\) avec \(u \in F\), \(-u \in G\). Par unicité, \(u = 0\).
\((\Leftarrow)\) Si \(u_1 + u_2 = v_1 + v_2\) avec \(u_i, v_i \in F_i\), alors \(u_1 - v_1 = v_2 - u_2 \in F \cap G = \{0\}\).
Définition 139 (Supplémentaires)
\(F\) et \(G\) sont supplémentaires dans \(E\) si \(E = F \oplus G\) : tout \(u \in E\) s’écrit de façon unique \(u = u_F + u_G\) avec \(u_F \in F\), \(u_G \in G\).
Exemple 78
Dans \(\mathbb{R}^3\) : \(\{(x,y,0)\}\) et \(\{(0,0,z)\}\) sont supplémentaires.
Dans \(\mathcal{C}^0(\mathbb{R})\) : fonctions paires et fonctions impaires sont supplémentaires (tout \(f\) s’écrit \(\frac{f(x)+f(-x)}{2} + \frac{f(x)-f(-x)}{2}\)).
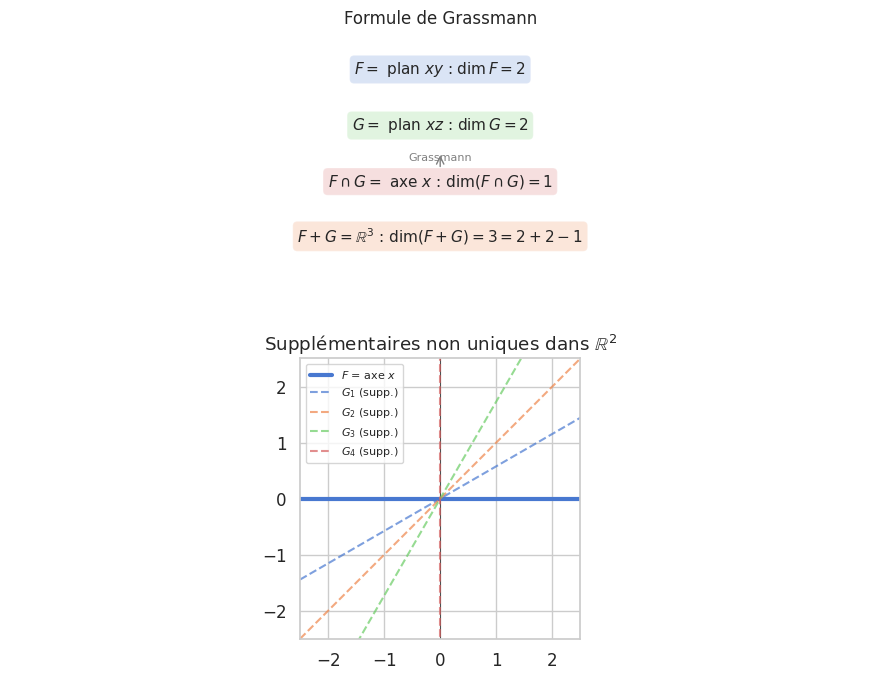
Le supplémentaire d’un sev n’est pas unique : dans \(\mathbb{R}^2\), toute droite vectorielle est supplémentaire de toute autre.
Familles libres, génératrices, bases#
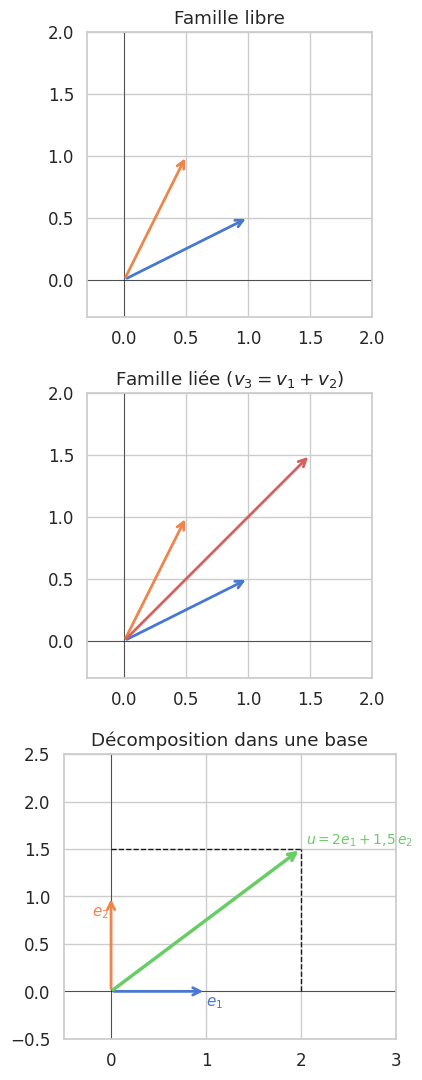
Définition 140 (Famille libre)
\((v_1, \ldots, v_p)\) est libre (linéairement indépendante) si
Une famille non libre est liée : l’un des vecteurs est combinaison linéaire des autres.
Définition 141 (Base)
Une base est une famille à la fois libre et génératrice.
\((e_1, \ldots, e_n)\) est une base \(\iff\) tout \(u \in E\) s’écrit de façon unique \(u = \sum_{i=1}^n \lambda_i e_i\).
Les \(\lambda_i\) sont les coordonnées de \(u\) dans la base.
Exemple 79
Base canonique de \(\mathbb{K}^n\) : \(e_i = (0,\ldots,0,1,0,\ldots,0)\).
Base canonique de \(\mathbb{K}_n[X]\) : \((1, X, X^2, \ldots, X^n)\).
Base canonique de \(\mathcal{M}_{n,p}\) : les \(E_{ij}\) (matrice élémentaire avec \(1\) en \((i,j)\)).
Dimension#
Proposition 221 (Théorème de la base incomplète)
Soit \(E\) un ev admettant une famille génératrice finie. Alors :
Toute famille libre peut être complétée en une base.
De toute famille génératrice, on peut extraire une base.
Toutes les bases ont le même nombre d’éléments.
Définition 142 (Dimension)
La dimension de \(E\), notée \(\dim E\), est le nombre d’éléments d’une base (bien défini par le théorème). Par convention \(\dim\{0\} = 0\).
Proposition 222 (Propriétés de la dimension)
Dans un ev de dimension \(n\) :
Toute famille libre a au plus \(n\) éléments.
Toute famille génératrice a au moins \(n\) éléments.
Une famille de \(n\) vecteurs est une base \(\iff\) elle est libre \(\iff\) elle est génératrice.
Si \(F\) est un sev : \(\dim F \leq n\), avec égalité \(\iff\) \(F = E\).
Proposition 223 (Formule de Grassmann)
Proof. Soit \((e_1, \ldots, e_r)\) base de \(F \cap G\), complétée en \((e_1,\ldots,e_r, f_1,\ldots,f_s)\) base de \(F\) et en \((e_1,\ldots,e_r, g_1,\ldots,g_t)\) base de \(G\).
Famille \((e_i, f_j, g_k)\) génératrice de \(F+G\) : tout \(u + v\) (\(u \in F\), \(v \in G\)) s’exprime sur ces vecteurs. ✓
Libre : Si \(\sum \alpha_i e_i + \sum \beta_j f_j + \sum \gamma_k g_k = 0\), alors \(\sum \gamma_k g_k \in F\) (autres termes dans \(F\)) et \(\in G\), donc \(\in F \cap G = \text{Vect}(e_i)\). Comme \((e_i, g_k)\) est libre : \(\gamma_k = 0\). Reste \(\sum\alpha_i e_i + \sum\beta_j f_j = 0\) avec \((e_i, f_j)\) libre : \(\alpha_i = \beta_j = 0\).
Donc \(\dim(F+G) = r + s + t = (r+s) + (r+t) - r\).
Proposition 224 (Somme directe et dimension)
Si \(E = F_1 \oplus \cdots \oplus F_p\) : \(\dim E = \sum_{i=1}^p \dim F_i\).
Tout sev \(F\) de \(E\) admet un supplémentaire (de dimension \(\dim E - \dim F\)).
Proof. L’existence du supplémentaire : compléter une base de \(F\) en base de \(E\), le sev engendré par les nouveaux vecteurs est un supplémentaire.
Rang et systèmes linéaires#
Remarque 86
Dans un espace \(E\) de dimension finie muni d’une base \(\mathcal{B}\), tout vecteur est identifié à ses coordonnées dans \(\mathbb{K}^n\). Étudier les sous-espaces revient à étudier les systèmes linéaires homogènes. Les outils numériques permettent d’explorer ces structures.
Dimension et dualité (aperçu)#
Définition 143 (Espace dual)
L”espace dual de \(E\) est \(E^* = \mathcal{L}(E, \mathbb{K})\), l’espace des formes linéaires sur \(E\).
Si \((e_1, \ldots, e_n)\) est une base de \(E\), la base duale \((e_1^*, \ldots, e_n^*)\) est définie par
Proposition 225
\(\dim E^* = \dim E\). Si \(E\) est de dimension \(n\), l’isomorphisme \(E \simeq E^*\) n’est pas canonique (dépend d’une base), mais \(E \simeq E^{**}\) est canonique.
Remarque 87
La distinction entre \(E\) et \(E^*\) est fondamentale en physique (covecteurs vs vecteurs, tenseurs) et en géométrie différentielle (formes différentielles).