Formes bilinéaires et quadratiques#
L’algèbre n’est qu’une géométrie écrite, la géométrie n’est qu’une algèbre figurée.
Sophie Germain
Introduction#
L’algèbre linéaire étudie les applications linéaires. Mais de nombreuses situations — énergie cinétique, produit scalaire, courbure des surfaces, coniques — font intervenir des expressions bilinéaires. Ce chapitre développe la théorie des formes bilinéaires symétriques et des formes quadratiques, culminant avec le théorème de Sylvester (loi d’inertie) et les applications aux coniques et quadriques.
Dans tout ce chapitre, \(E\) désigne un \(\mathbb{K}\)-espace vectoriel de dimension finie \(n\), avec \(\mathbb{K} = \mathbb{R}\) ou \(\mathbb{C}\).
Formes bilinéaires#
Définition 179 (Forme bilinéaire)
Une forme bilinéaire sur \(E\) est une application \(\varphi : E \times E \to \mathbb{K}\) linéaire en chacune de ses deux variables. On note \(\mathcal{B}(E)\) l’ensemble des formes bilinéaires sur \(E\).
Exemple 94
Sur \(\mathbb{R}^n\) : \(\varphi(x, y) = x^T A y\) pour une matrice \(A \in \mathcal{M}_n(\mathbb{R})\)
Sur \(\mathbb{R}^n\) : \(\varphi(x, y) = \sum_i x_i y_i\) (produit scalaire canonique)
Sur \(\mathcal{C}([0,1])\) : \(\varphi(f, g) = \int_0^1 f(t)g(t)\,dt\)
Le déterminant \(\det(u, v)\) dans \(\mathbb{R}^2\) : forme bilinéaire antisymétrique
Définition 180 (Symétrie et antisymétrie)
\(\varphi\) est symétrique si \(\varphi(x,y) = \varphi(y,x)\) pour tous \(x, y \in E\). \(\varphi\) est antisymétrique si \(\varphi(x,y) = -\varphi(y,x)\) pour tous \(x, y \in E\).
Proposition 268 (Décomposition symétrique/antisymétrique)
Si \(\operatorname{car}(\mathbb{K}) \neq 2\), toute forme bilinéaire \(\varphi\) se décompose de manière unique :
Proof. \(\varphi_s\) est symétrique et \(\varphi_a\) antisymétrique par construction. L’unicité : si \(\varphi = s + a\), évaluer en \((x,y)\) et \((y,x)\) donne \(s = \varphi_s\), \(a = \varphi_a\).
Définition 181 (Non-dégénérescence)
\(\varphi\) est non dégénérée si son noyau à gauche \(\ker_g(\varphi) = \{x : \forall y,\, \varphi(x,y) = 0\} = \{0\}\).
Si \(\varphi\) est symétrique, les noyaux à gauche et à droite coïncident.
Matrice d’une forme bilinéaire#
Définition 182 (Matrice associée)
Soit \(\mathcal{B} = (e_1, \ldots, e_n)\) une base de \(E\). La matrice de \(\varphi\) dans \(\mathcal{B}\) est
Proposition 269 (Expression matricielle)
Si \(X, Y\) sont les vecteurs colonnes des coordonnées de \(x, y\) dans \(\mathcal{B}\), alors
Proof. Par bilinéarité : \(\varphi(x,y) = \varphi(\sum_i x_i e_i, \sum_j y_j e_j) = \sum_{i,j} x_i y_j \varphi(e_i, e_j) = X^T A Y\).
Proposition 270 (Propriétés matricielles)
\(\varphi\) symétrique \(\iff\) \(A = A^T\)
\(\varphi\) antisymétrique \(\iff\) \(A = -A^T\)
\(\varphi\) non dégénérée \(\iff\) \(\det(A) \neq 0\)
Proposition 271 (Changement de base)
Si \(P\) est la matrice de passage de \(\mathcal{B}\) à \(\mathcal{B}'\), alors
Proof. Si \(x\) a coordonnées \(X'\) dans \(\mathcal{B}'\), alors \(X = PX'\) dans \(\mathcal{B}\). \(\varphi(x,y) = X^T A Y = (PX')^T A (PY') = X'^T (P^T A P) Y'\).
Définition 183 (Congruence)
\(A, B \in \mathcal{M}_n(\mathbb{K})\) sont congruentes s’il existe \(P \in GL_n(\mathbb{K})\) telle que \(B = P^T A P\).
La congruence est une relation d’équivalence. Elle classifie les formes bilinéaires à changement de base près.
Remarque 101
Attention : congruence (\(B = P^T A P\)) \(\neq\) similitude (\(B = P^{-1} A P\)). Les valeurs propres sont invariantes par similitude, mais pas par congruence. La signature est l’invariant de la congruence réelle.
Formes quadratiques#
Définition 184 (Forme quadratique)
La forme quadratique associée à \(\varphi\) bilinéaire symétrique est
\(q\) est homogène de degré 2 : \(q(\lambda x) = \lambda^2 q(x)\).
Proposition 272 (Identités de polarisation)
La forme polaire \(\varphi\) se retrouve à partir de \(q\) (si \(\operatorname{car}(\mathbb{K}) \neq 2\)) :
Proof. \(q(x+y) = \varphi(x+y, x+y) = q(x) + 2\varphi(x,y) + q(y)\) par symétrie et bilinéarité. D’où la première formule. La seconde découle de \(q(x-y) = q(x) - 2\varphi(x,y) + q(y)\) en soustrayant.
Remarque 102
La correspondance \(\varphi \leftrightarrow q\) est une bijection (en car. \(\neq 2\)) : \(q\) détermine entièrement \(\varphi\) par polarisation.
Définition 185 (Rang et noyau)
Le rang de \(q\) est le rang de \(\varphi\). Le noyau de \(q\) est \(\ker(q) = \{x : \forall y,\, \varphi(x,y) = 0\}\).
\(q\) est non dégénérée si \(\ker(q) = \{0\}\), soit \(\operatorname{rg}(q) = n\).
Exemple 95
Sur \(\mathbb{R}^3\) : \(q(x,y,z) = x^2 + 2y^2 - z^2 + 4xy - 2xz\) a pour matrice
Les coefficients diagonaux donnent \(a_{ii} = \varphi(e_i, e_i)\), et \(a_{ij} = \varphi(e_i, e_j)\) est la moitié du coefficient de \(x_i x_j\).
Orthogonalité#
Définition 186 (Orthogonalité pour \(\varphi\))
\(x, y \in E\) sont \(\varphi\)-orthogonaux si \(\varphi(x,y) = 0\). L”orthogonal de \(A \subset E\) est \(A^\perp = \{x \in E : \forall a \in A,\, \varphi(x,a) = 0\}\).
Proposition 273 (Formule de dimension de l’orthogonal)
Si \(F\) est un sous-espace vectoriel de \(E\) et \(\varphi\) est une forme bilinéaire symétrique :
En particulier, si \(\varphi\) est non dégénérée : \(\dim(F) + \dim(F^\perp) = n\).
Proof. Considérons \(\Phi_F : E \to F^*\), \(x \mapsto \varphi(x, \cdot)|_F\). Son noyau est \(F^\perp\). Par le théorème du rang : \(n = \dim(F^\perp) + \dim(\operatorname{Im}(\Phi_F))\). L’application \(\Psi : F \to E^*\), \(y \mapsto \varphi(\cdot, y)\), a pour noyau \(F \cap \ker(\varphi)\) et \(\dim(\operatorname{Im}\Psi) = \dim(\operatorname{Im}\Phi_F)\) (par symétrie de \(\varphi\)). Donc \(\dim(F) - \dim(F \cap \ker(\varphi)) = n - \dim(F^\perp)\).
Bases orthogonales et algorithme de Gauss#
Définition 187 (Base orthogonale)
\((e_1, \ldots, e_n)\) est orthogonale pour \(\varphi\) si \(\varphi(e_i, e_j) = 0\) pour \(i \neq j\). Dans une base orthogonale, la matrice de \(\varphi\) est diagonale et
Théorème 1 (Existence d’une base orthogonale)
Toute forme quadratique sur un espace de dimension finie admet une base orthogonale.
Proof. Par récurrence sur \(n\). Si \(q = 0\), toute base convient. Sinon, il existe \(e_1 \in E\) avec \(q(e_1) \neq 0\) (si tous les \(q(x) = 0\), polarisation donne \(\varphi \equiv 0\) donc \(q \equiv 0\) : contradiction).
Posons \(H = \{e_1\}^\perp\). Comme \(q(e_1) \neq 0\), on a \(e_1 \notin H\), donc \(\dim H = n-1\) et \(E = \operatorname{Vect}(e_1) \oplus H\) (décomposition : \(x = \frac{\varphi(x,e_1)}{q(e_1)} e_1 + (x - \frac{\varphi(x,e_1)}{q(e_1)} e_1)\)). Par hypothèse de récurrence, \(q|_H\) a une base orthogonale \((e_2, \ldots, e_n)\).
Remarque 103
Algorithme de Gauss (complétion du carré) :
Cas 1 : il existe \(i\) tel que \(a_{ii} \neq 0\). On complète le carré en \(x_i\) :
Cas 2 : tous les \(a_{ii} = 0\) mais \(a_{ij} \neq 0\). Changement \(x_i = u+v\), \(x_j = u-v\) pour créer un terme \(u^2\).
Exemple 96
Réduire \(q(x,y,z) = 2xy + 2xz + 2yz\).
Tous les \(a_{ii} = 0\). Cas 2 : \(x = u+v\), \(y = u-v\).
Complétion en \(u\) : \(q = 2(u+z)^2 - 2z^2 - 2v^2\).
En posant \(U = u+z\), \(V = v\), \(W = z\) : \(q = 2U^2 - 2V^2 - 2W^2\).
Signature \((1, 2)\).
Signature d’une forme quadratique réelle#
Définition 188 (Signe d’une forme quadratique)
Soit \(q\) une forme quadratique réelle.
\(q\) est positive (resp. négative) si \(q(x) \geq 0\) (resp. \(\leq 0\)) pour tout \(x\)
\(q\) est définie positive (resp. négative) si \(q(x) > 0\) (resp. \(< 0\)) pour tout \(x \neq 0\)
\(q\) est indéfinie si elle prend des valeurs positives et négatives
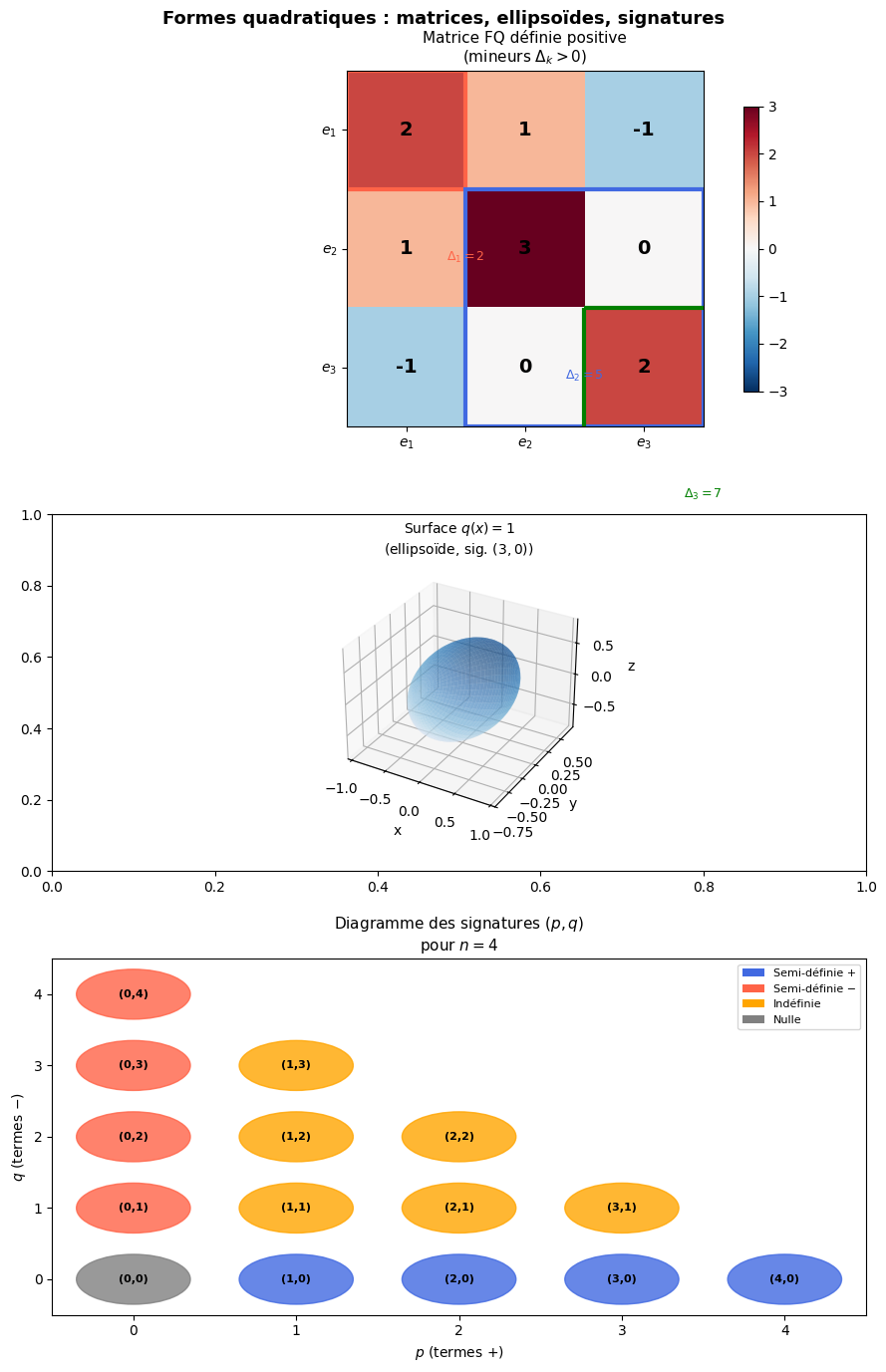
Théorème 2 (Loi d’inertie de Sylvester)
Soit \(q\) une forme quadratique sur un \(\mathbb{R}\)-espace vectoriel de dimension \(n\). Dans toute base orthogonale,
Le couple \((p, q)\), appelé signature de \(q\), est un invariant : il ne dépend pas de la base orthogonale choisie. On a \(p + q = \operatorname{rg}(q)\).
Proof. Existence : base orthogonale avec \(\lambda_1 > 0\), …, \(\lambda_p > 0\), \(\lambda_{p+1} < 0\), …, \(\lambda_{p+q} < 0\), puis \(0, \ldots, 0\). Le changement \(y_i = \sqrt{|\lambda_i|} x_i\) donne la forme canonique.
Unicité de \(p\) : soit \(F^+ = \operatorname{Vect}(e_1, \ldots, e_p)\) (sur lequel \(q > 0\) sauf en \(0\)) et \(G^- = \operatorname{Vect}(e_{p+1}, \ldots, e_n)\) (sur lequel \(q \leq 0\)). Si \(F\) est un sous-espace sur lequel \(q\) est définie positive, alors \(F \cap G^- = \{0\}\) (car \(q(x) > 0\) et \(q(x) \leq 0\) sont incompatibles pour \(x \neq 0\)). Donc \(\dim F \leq n - \dim G^- = p\). Ainsi \(p = \max\{\dim F : q|_F > 0\}\), qui est un invariant.
Remarque 104
Signature |
Nom |
|---|---|
\((n, 0)\) |
Définie positive |
\((0, n)\) |
Définie négative |
\((p, 0)\), \(p < n\) |
Positive (semi-définie) |
\((p, q)\), \(pq > 0\), \(p+q = n\) |
Indéfinie non dégénérée |
\((p, q)\), \(p + q < n\) |
Dégénérée |
Proposition 274 (Critère de Sylvester (mineurs principaux))
Soit \(A \in \mathcal{M}_n(\mathbb{R})\) symétrique. La forme quadratique \(q(x) = x^T A x\) est définie positive si et seulement si tous les mineurs principaux \(\Delta_k = \det(A_{[1..k, 1..k]})\) sont strictement positifs.
Proof. Par récurrence sur \(n\). Si \(\Delta_1 = a_{11} > 0\), on peut compléter le carré en \(x_1\). La matrice du reste est le complément de Schur \(A_{22} - A_{21} A_{11}^{-1} A_{12}\), dont les mineurs sont \(\Delta_k/\Delta_{k-1} > 0\).
Application aux coniques et quadriques#
Définition 189 (Conique)
Une conique dans \(\mathbb{R}^2\) est l’ensemble des solutions de \(\varphi(x) = 0\) où \(\varphi(x,y) = ax^2 + 2bxy + cy^2 + dx + ey + f\) (polynôme de degré \(\leq 2\)).
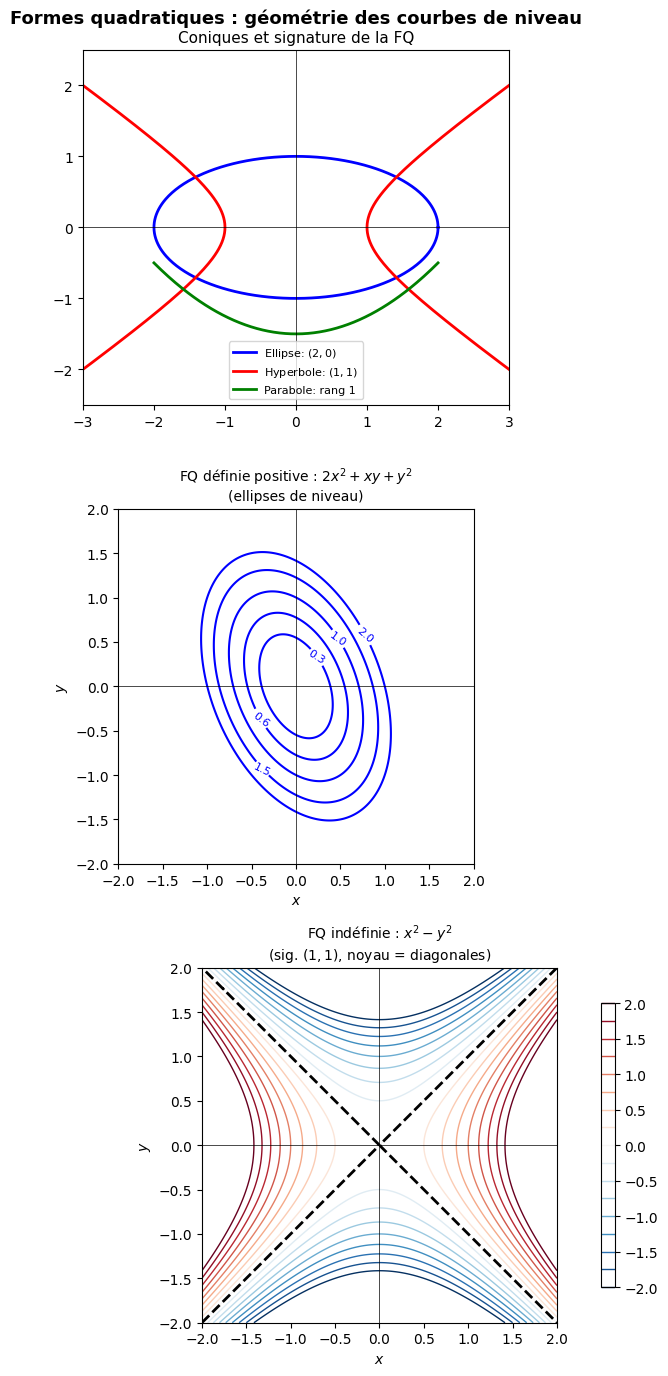
Proposition 275 (Classification des coniques par la signature)
En coordonnées principales (diagonalisant la partie quadratique), une conique réelle non dégénérée est :
Une ellipse si la signature de la FQ est \((2, 0)\) : \(\frac{x^2}{a^2} + \frac{y^2}{b^2} = 1\)
Une hyperbole si la signature est \((1, 1)\) : \(\frac{x^2}{a^2} - \frac{y^2}{b^2} = 1\)
Une parabole si le rang de la FQ est \(1\) : \(y = ax^2\)
Proof. On diagonalise la matrice \(2 \times 2\) de la partie quadratique (symétrique réelle, donc diagonalisable en base orthonormée par le théorème spectral). En translatant pour éliminer les termes linéaires si possible, on obtient la forme canonique.
Exemple 97
Identifier la conique \(3x^2 + 4xy - y^2 - 2x + y + 1 = 0\).
Partie quadratique : \(q = 3x^2 + 4xy - y^2\), matrice \(A = \begin{pmatrix} 3 & 2 \\ 2 & -1 \end{pmatrix}\).
\(\det(A) = -3 - 4 = -7 < 0\) : signature \((1,1)\) → hyperbole.

Formes bilinéaires non dégénérées et espaces quadratiques#
Définition 190 (Espace quadratique)
Un espace quadratique est un couple \((E, q)\) avec \(q\) forme quadratique non dégénérée sur \(E\).
Proposition 276 (Supplémentaire orthogonal)
Dans un espace quadratique \((E, q)\), pour tout sous-espace \(F\) :
Proof. \(q|_F\) non dégénérée \(\iff\) \(F \cap F^\perp = \{0\}\). Comme \(\dim F + \dim F^\perp = n\), cela équivaut à \(E = F \oplus F^\perp\).
Définition 191 (Isométrie et groupe orthogonal)
Une isométrie de \((E, q)\) est un automorphisme \(u \in GL(E)\) tel que \(q \circ u = q\).
Le groupe orthogonal est \(O(q) = \{u \in GL(E) : q \circ u = q\}\).
Pour \(q = \) produit scalaire standard : \(O(q) = O(n)\) (matrices orthogonales).
Proposition 277
\(u \in O(q)\) \(\iff\) \(\varphi(u(x), u(y)) = \varphi(x, y)\) pour tous \(x, y \in E\).
Proof. Par polarisation : \(\varphi(u(x), u(y)) = \frac{1}{2}(q(u(x)+u(y)) - q(u(x)) - q(u(y))) = \frac{1}{2}(q(x+y) - q(x) - q(y)) = \varphi(x,y)\).
Résumé#
Concept |
Résultat clé |
|---|---|
Forme bilinéaire |
\(\varphi(x,y) = X^T A Y\) |
Changement de base |
\(A' = P^T A P\) (congruence) |
Forme quadratique |
\(q(x) = \varphi(x,x)\), polarisation |
Base orthogonale |
Existe toujours (Gauss) |
Loi d’inertie |
Signature \((p,q)\) invariante (Sylvester) |
Définie positive |
\((p,q) = (n,0)\), critère des mineurs |
Coniques |
Signature détermine le type |
Groupe orthogonal |
\(O(q) = \{u : q \circ u = q\}\) |