Équations différentielles linéaires#
Les équations différentielles sont le langage dans lequel les lois de la nature sont écrites.
— Isaac Newton
Introduction et structure générale#
Définition 129 (EDL d’ordre \(n\))
Une équation différentielle linéaire (EDL) d’ordre \(n\) est
avec \(a_0,\ldots,a_n, b \in \mathcal{C}^0(I,\mathbb{K})\) et \(a_n \neq 0\) sur \(I\).
Proposition 204 (Structure des solutions)
Soit \(L : y \mapsto a_n y^{(n)} + \cdots + a_0 y\) l’opérateur différentiel (linéaire).
L’ensemble \(\mathcal{S}_H = \ker L\) des solutions de l”équation homogène \(Ly = 0\) est un sous-espace vectoriel de \(\mathcal{C}^n(I)\) de dimension \(n\).
L’ensemble \(\mathcal{S}\) des solutions de \(Ly = b\) est un sous-espace affine : \(\mathcal{S} = y_0 + \mathcal{S}_H\) pour toute solution particulière \(y_0\).
Proof. \(L\) est linéaire car la dérivation l’est. Donc \(\mathcal{S}_H = \ker L\) est un sev.
Si \(Ly = Lz = b\), alors \(L(y-z) = 0\), donc \(y - z \in \mathcal{S}_H\), d’où \(y \in z + \mathcal{S}_H\).
\(\dim \mathcal{S}_H = n\) : c’est la conséquence du théorème de Cauchy-Lipschitz (une solution est déterminée par ses \(n\) conditions initiales \((y(t_0), y'(t_0), \ldots, y^{(n-1)}(t_0))\)).
Remarque 84
Stratégie. Pour résoudre \(Ly = b\) :
Résoudre l’homogène \(Ly = 0\) : trouver \(\mathcal{S}_H\) (un espace vectoriel de dimension \(n\)).
Trouver une solution particulière \(y_0\) de \(Ly = b\).
Solution générale : \(y = y_0 + c_1 y_1 + \cdots + c_n y_n\), où \((y_1,\ldots,y_n)\) est une base de \(\mathcal{S}_H\).
Équations du premier ordre#
Homogène#
Proposition 205 (EDL1 homogène)
Les solutions de \(y' + a(t)\,y = 0\) (avec \(a\) continue sur \(I\)) sont
où \(A\) est une primitive de \(a\). L’espace \(\mathcal{S}_H\) est de dimension 1.
Proof. Posons \(z(t) = y(t)\,e^{A(t)}\). Alors \(z'(t) = (y' + ay)\,e^A = 0\), donc \(z\) est constante.
Équation complète : variation de la constante#
Proposition 206 (EDL1 complète)
Les solutions de \(y' + a(t)\,y = b(t)\) sont
Proof. On cherche une solution particulière sous la forme \(y_0 = C(t)\,e^{-A(t)}\) (variation de la constante). Alors \(y_0' + ay_0 = C'(t)\,e^{-A(t)} = b(t)\), d’où \(C'(t) = b(t)\,e^{A(t)}\).
Théorème de Cauchy-Lipschitz (ordre 1)#
Proposition 207 (Existence et unicité)
Si \(a, b \in \mathcal{C}^0(I)\) et \((t_0, y_0) \in I \times \mathbb{K}\), le problème de Cauchy
admet une unique solution définie sur \(I\) tout entier.
Exemple 71
\(y' - 2ty = t\) sur \(\mathbb{R}\).
Homogène : \(y_H = Ce^{t^2}\).
Variation de la constante : \(C'(t)e^{t^2} = t\), soit \(C'(t) = te^{-t^2}\), d’où \(C(t) = -\frac12 e^{-t^2}\).
Solution particulière : \(y_0 = -\frac12\). Solution générale : \(y = Ce^{t^2} - \frac12\).
Équations du second ordre à coefficients constants#
Définition 130 (EDL2 à coefficients constants)
Proposition 208 (Solutions de l’homogène)
L”équation caractéristique \(r^2 + ar + b = 0\) (\(\Delta = a^2 - 4b\)) donne :
Cas |
Racines |
Solution générale de \(y''+ay'+by=0\) |
|---|---|---|
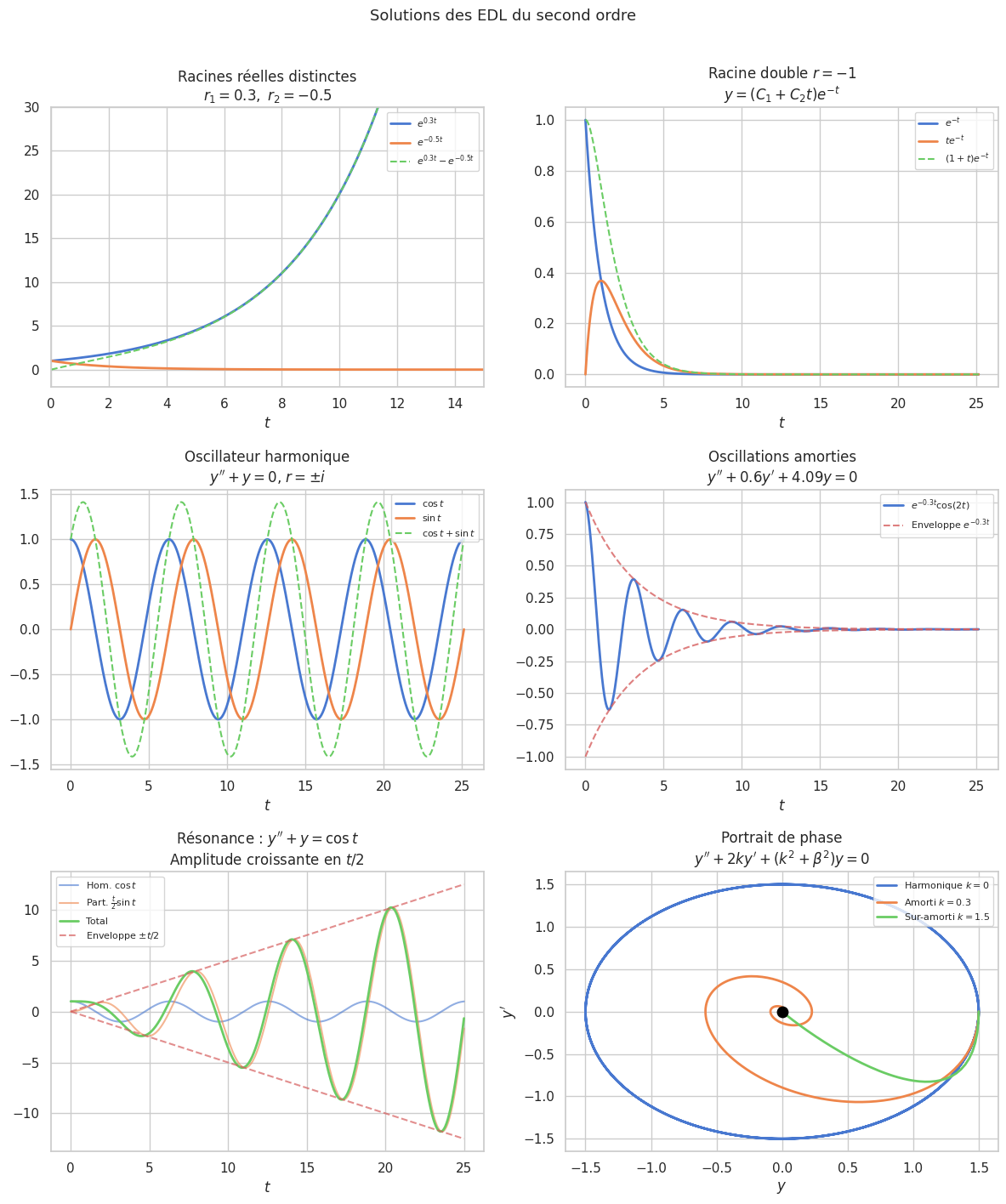
\(\Delta > 0\) |
\(r_1 \neq r_2 \in \mathbb{R}\) |
\(C_1 e^{r_1 t} + C_2 e^{r_2 t}\) |
\(\Delta = 0\) |
\(r = -a/2\) (double) |
\((C_1 + C_2 t)\,e^{rt}\) |
\(\Delta < 0\) |
\(r = \alpha \pm i\beta\) |
\(e^{\alpha t}(C_1\cos\beta t + C_2\sin\beta t)\) |
\(\mathcal{S}_H\) est de dimension 2 dans chaque cas.
Proof. On cherche \(y = e^{rt}\) : \((r^2 + ar + b)e^{rt} = 0 \Leftrightarrow r^2 + ar + b = 0\).
Racine double. \(e^{rt}\) est solution. Pour \(te^{rt}\) : \((te^{rt})'' + a(te^{rt})' + bte^{rt} = t(r^2+ar+b)e^{rt} + (2r+a)e^{rt} = 0\) car \(r^2+ar+b = 0\) et \(2r + a = 0\) (racine double). ✓
Racines complexes. \(e^{(\alpha+i\beta)t} = e^{\alpha t}(\cos\beta t + i\sin\beta t)\) est solution complexe. Les parties réelle et imaginaire sont deux solutions réelles indépendantes.
Exemple 72
\(y'' - 3y' + 2y = 0\) : \(r^2 - 3r + 2 = (r-1)(r-2)\). \(y = C_1 e^t + C_2 e^{2t}\).
\(y'' - 2y' + y = 0\) : \(r = 1\) double. \(y = (C_1 + C_2 t)e^t\).
\(y'' + y = 0\) (oscillateur harmonique) : \(r = \pm i\). \(y = C_1\cos t + C_2\sin t\).
\(y'' + 2y' + 5y = 0\) : \(r = -1 \pm 2i\). \(y = e^{-t}(C_1\cos 2t + C_2\sin 2t)\).
Solutions particulières : second membre exponentiel-polynomial#
Proposition 209 (Méthode d’identification)
Pour \(y'' + ay' + by = P(t)e^{\alpha t}\) (\(P\) polynôme de degré \(d\)) :
\(\alpha\) non racine de l’éq. car. : \(y_0 = Q(t)e^{\alpha t}\) avec \(\deg Q = d\)
\(\alpha\) racine simple : \(y_0 = tQ(t)e^{\alpha t}\)
\(\alpha\) racine double : \(y_0 = t^2 Q(t)e^{\alpha t}\)
Pour \(P(t)e^{\alpha t}\cos(\beta t)\) ou \(P(t)e^{\alpha t}\sin(\beta t)\) : on traite \(P(t)e^{(\alpha+i\beta)t}\) et on prend Re ou Im.
Exemple 73
Résonance. \(y'' + y = \cos t\) : \(\alpha = i\) est racine simple de \(r^2 + 1 = 0\).
On cherche \(\mathrm{Re}(te^{it} \cdot A)\). \((te^{it})'' + te^{it} = 2ie^{it} = 1 \cdot e^{it}\), donc \(2iA = 1\), \(A = \frac{1}{2i} = -\frac{i}{2}\).
\(y_0 = \mathrm{Re}\left(-\frac{it}{2}e^{it}\right) = \frac{t}{2}\sin t\) (résonance : amplitude croissante).
Solution générale : \(y = C_1\cos t + C_2\sin t + \frac{t}{2}\sin t\).
Wronskien et indépendance des solutions#
Définition 131 (Wronskien)
Le wronskien de \((y_1, \ldots, y_n)\) est
Proposition 210 (Critère d’indépendance)
\((y_1, \ldots, y_n)\) solutions de \(Ly = 0\) sont linéairement indépendantes (base de \(\mathcal{S}_H\)) \(\iff\) \(W(t_0) \neq 0\) pour un (et alors tout) \(t_0 \in I\).
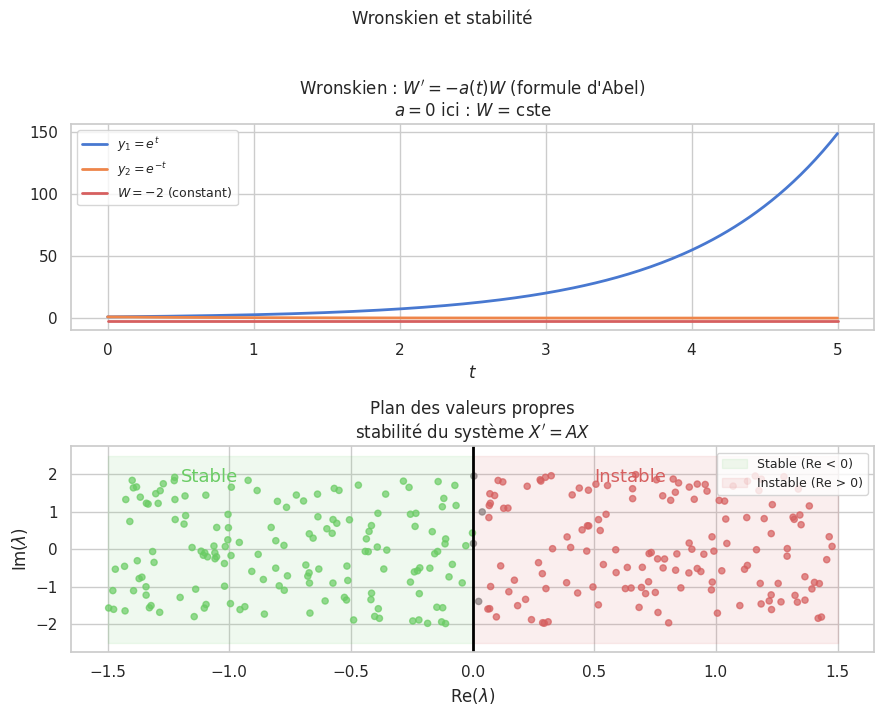
Proposition 211 (Formule d’Abel (Liouville))
Si \(y_1, y_2\) sont solutions de \(y'' + a(t)y' + b(t)y = 0\) :
En particulier : \(W \equiv 0\) ou \(W\) ne s’annule jamais.
Proof. \(W = y_1 y_2' - y_2 y_1'\). \(W' = y_1 y_2'' - y_2 y_1'' = y_1(-ay_2'-by_2) - y_2(-ay_1'-by_1) = -a(y_1y_2'-y_2y_1') = -aW\).
Variation des constantes (ordre 2)#
Proposition 212 (Méthode de variation des constantes)
Soit \((y_1, y_2)\) base de \(\mathcal{S}_H\). On cherche \(y_0 = C_1(t)y_1 + C_2(t)y_2\) avec la contrainte \(C_1'y_1 + C_2'y_2 = 0\) (système de Lagrange) :
Le déterminant est \(W \neq 0\), donc :
Exemple 74
\(y'' + y = \frac{1}{\cos t}\) sur \(]-\pi/2, \pi/2[\).
Homogène : \(y_1 = \cos t\), \(y_2 = \sin t\), \(W = 1\).
\(C_1'(t) = -\sin t / \cos t = -\tan t\), \(C_1 = \ln|\cos t|\). \(C_2'(t) = 1\), \(C_2 = t\).
\(y_0 = \cos t \cdot \ln|\cos t| + t\sin t\).
EDL d’ordre \(n\) à coefficients constants#
Proposition 213 (Solution de l’homogène (ordre \(n\)))
Si l’équation caractéristique \(r^n + a_{n-1}r^{n-1} + \cdots + a_0 = 0\) admet les racines \(r_1,\ldots,r_p\) de multiplicités \(m_1,\ldots,m_p\) (\(\sum m_i = n\)), alors :
où \(P_k\) est un polynôme de degré \(< m_k\) (à \(m_k\) constantes arbitraires).
Exemple 75
\(y^{(4)} + 2y'' + y = 0\) : \(r^4 + 2r^2 + 1 = (r^2+1)^2 = 0\), racines \(\pm i\) (mult. 2).
Systèmes différentiels linéaires#
Définition 132 (Système différentiel linéaire)
Proposition 214 (Théorème de Cauchy-Lipschitz (ordre \(n\)))
Pour tout \((t_0, X_0) \in I \times \mathbb{K}^n\), le problème de Cauchy \(X' = AX + B\), \(X(t_0) = X_0\) admet une unique solution définie sur \(I\) tout entier.
Proposition 215 (Réduction par diagonalisation)
Si \(A\) est diagonalisable : \(A = PDP^{-1}\), \(D = \mathrm{diag}(\lambda_i)\). Le changement \(X = PY\) transforme \(X' = AX\) en \(Y' = DY\) (système découplé) :
D’où \(X(t) = P\,\mathrm{diag}(e^{\lambda_i t})\,\mathbf{C}\) avec \(\mathbf{C} = P^{-1}X_0\).
Proposition 216 (Solution par exponentielle de matrice)
La solution de \(X' = AX\), \(X(0) = X_0\) (avec \(A\) constante) est
Proof. \(\Phi(t) = e^{tA}\) vérifie \(\Phi'(t) = A\Phi(t)\) (dériver terme à terme) et \(\Phi(0) = I_n\).
Valeurs propres : [0.5+1.32287566j 0.5-1.32287566j]
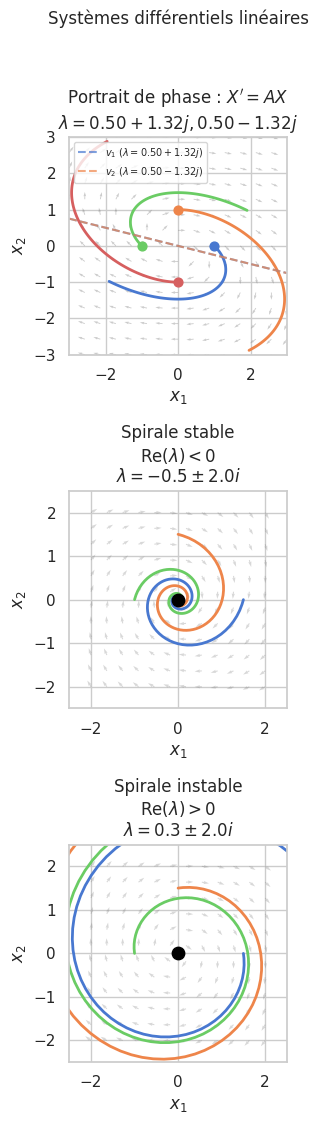
Stabilité des systèmes linéaires#
Définition 133 (Stabilité)
Le point d’équilibre \(0\) du système \(X' = AX\) est :
stable si tout \(X(t) \to 0\) quand \(t \to +\infty\)
marginalement stable si les trajectoires restent bornées
instable sinon
Proposition 217 (Critère de stabilité)
Spectre de \(A\) |
Comportement |
|---|---|
Toutes les VP : \(\mathrm{Re}(\lambda) < 0\) |
Stable (spirale/nœud stable) |
\(\mathrm{Re}(\lambda) \leq 0\), parties imaginaires pures simples |
Marginal |
Au moins une VP : \(\mathrm{Re}(\lambda) > 0\) |
Instable |
Remarque 85
Pour un système \(X' = AX\) stable, toutes les solutions \(X(t) \to 0\) exponentiellement vite, à la vitesse \(e^{\max_\lambda \mathrm{Re}(\lambda) \cdot t}\).