Déterminants#
Le déterminant est le volume signé de la transformation.
— Carl Friedrich Gauss
Permutations et signature#
Définition 164 (Permutation et groupe symétrique)
Une permutation de \(\{1,\ldots,n\}\) est une bijection \(\sigma : \{1,\ldots,n\} \to \{1,\ldots,n\}\).
\(\mathfrak{S}_n\) est le groupe symétrique d’ordre \(n! = |\mathfrak{S}_n|\). C’est le groupe (non abélien pour \(n \geq 3\)) des permutations, de loi \(\circ\).
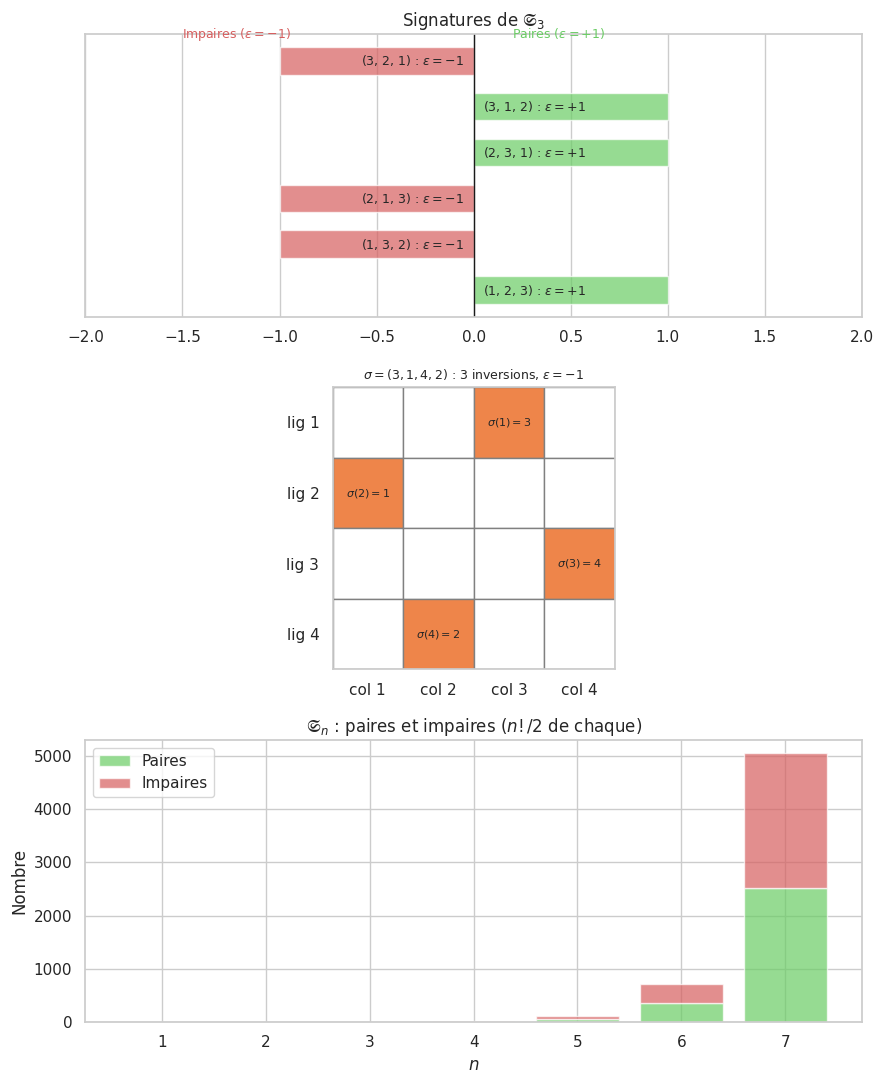
Définition 165 (Transposition et signature)
Une transposition \(\tau_{ij}\) échange \(i\) et \(j\) (fixe les autres).
Toute permutation est un produit de transpositions. La signature \(\varepsilon : \mathfrak{S}_n \to \{+1,-1\}\) est l’unique morphisme de groupes vérifiant \(\varepsilon(\tau) = -1\) pour toute transposition :
Proposition 248 (Propriétés de la signature)
\(\varepsilon(\sigma \circ \tau) = \varepsilon(\sigma)\,\varepsilon(\tau)\) (morphisme)
\(\varepsilon(\sigma^{-1}) = \varepsilon(\sigma)\)
\(\varepsilon(\text{id}) = +1\), \(\varepsilon(\tau_{ij}) = -1\)
Un \(k\)-cycle \(\varepsilon = (-1)^{k-1}\)
Formes multilinéaires alternées et déterminant#
Définition 166 (Forme \(n\)-linéaire alternée)
\(\varphi : E^n \to \mathbb{K}\) est \(n\)-linéaire alternée si elle est linéaire en chaque variable (les autres fixées) et s’annule dès que deux arguments sont égaux.
Proposition 249 (Propriétés)
Si \(\varphi\) est \(n\)-linéaire alternée :
Antisymétrie : l’échange de deux arguments change le signe
Famille liée : \(\varphi(v_1,\ldots,v_n) = 0\) si \((v_i)\) est liée
Action des permutations : \(\varphi(v_{\sigma(1)},\ldots,v_{\sigma(n)}) = \varepsilon(\sigma)\,\varphi(v_1,\ldots,v_n)\)
L’espace des formes \(n\)-linéaires alternées sur un ev de dimension \(n\) est de dimension 1.
Définition 167 (Déterminant)
Le déterminant de \(A = (a_{ij}) \in \mathcal{M}_n(\mathbb{K})\) est l’unique forme \(n\)-linéaire alternée en les colonnes valant \(1\) sur \(I_n\) :
Exemple 87
Règle de Sarrus (dimension 3) :
Propriétés fondamentales#
Proposition 250 (Propriétés du déterminant)
Soit \(A, B \in \mathcal{M}_n(\mathbb{K})\).
\(\det(I_n) = 1\)
\(\det(A^T) = \det(A)\)
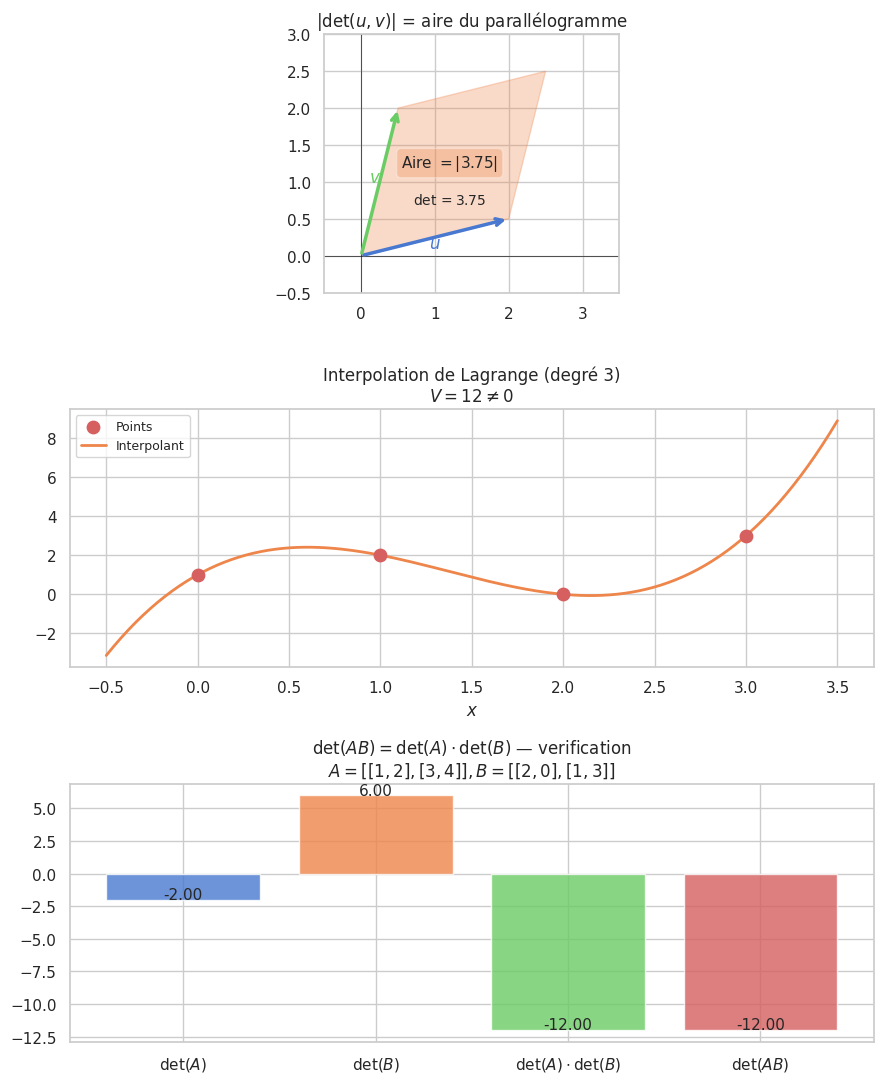
\(\det(AB) = \det(A)\,\det(B)\) (morphisme multiplicatif)
\(A \in GL_n(\mathbb{K}) \iff \det(A) \neq 0\), et \(\det(A^{-1}) = 1/\det(A)\)
\(\det(\lambda A) = \lambda^n \det(A)\)
\(\det(P^{-1}AP) = \det(A)\) (invariant par similitude)
Proof. \(\det(AB) = \det(A)\det(B)\). Si \(B\) est inversible, l’application \(A \mapsto \det(AB)\) est \(n\)-linéaire alternée en les colonnes de \(A\), valant \(\det(B)\) pour \(A = I_n\). Par unicité, \(\det(AB) = \det(B)\det(A)\). Si \(B\) n’est pas inversible, \(AB\) ne l’est pas non plus, donc \(\det(AB) = 0 = \det(A) \cdot 0\).
Proposition 251 (Effet des opérations élémentaires)
Opération |
Effet sur \(\det\) |
|---|---|
\(L_i \leftrightarrow L_j\) |
Multiplie par \(-1\) |
\(L_i \leftarrow \lambda L_i\) |
Multiplie par \(\lambda\) |
\(L_i \leftarrow L_i + \lambda L_j\) |
Inchangé |
Remarque 91
En pratique, on calcule \(\det(A)\) par pivot de Gauss : on met \(A\) sous forme triangulaire \(T\) en notant les opérations effectuées, puis \(\det(A) = (\pm 1)^{\text{nb échanges}} \cdot \prod_i T_{ii}\).
Calcul par développement#
Définition 168 (Mineur et cofacteur)
Le mineur \(M_{ij}\) est le déterminant de la sous-matrice obtenue en supprimant la ligne \(i\) et la colonne \(j\).
Le cofacteur est \(C_{ij} = (-1)^{i+j} M_{ij}\).
Proposition 252 (Développement par rapport à une ligne/colonne)
Exemple 88
(développement par la 1ère colonne)
Proposition 253 (Matrices triangulaires)
Déterminant de Vandermonde#
Proposition 254 (Déterminant de Vandermonde)
Non nul \(\iff\) les \(x_i\) sont deux à deux distincts.
Proof. \(V\) est un polynôme en \(x_1,\ldots,x_n\). Si \(x_i = x_j\), deux colonnes sont égales donc \(V = 0\), i.e. \((x_j - x_i) \mid V\). Les facteurs \(\prod_{i<j}(x_j-x_i)\) (degré \(\binom{n}{2}\)) divisent \(V\) (même degré), à constante près. Le coefficient dominant est 1 (par récurrence).
Remarque 92
Application à l”interpolation de Lagrange : par \(n\) points \((x_i, y_i)\) à abscisses distinctes, il existe un unique polynôme de degré \(\leq n-1\). Le système \((x_i^j)_{ij}\) est le transposé de Vandermonde, inversible car \(V \neq 0\).
Comatrice, formule de l’inverse, et formules de Cramer#
Définition 169 (Comatrice)
La comatrice de \(A\) est \(\mathrm{com}(A) = (C_{ij})^T\) (transposée de la matrice des cofacteurs).
Proposition 255 (Formule de l’inverse)
Proof. \((A \cdot \mathrm{com}(A))_{ik} = \sum_j a_{ij} C_{kj}\).
Si \(i=k\) : c’est le développement de \(\det(A)\) par la ligne \(i\). ✓
Si \(i\neq k\) : c’est le développement d’une matrice avec deux lignes identiques (lignes \(i\) et \(k\) identiques) : nul. ✓
Proposition 256 (Formules de Cramer)
Si \(A \in GL_n(\mathbb{K})\), l’unique solution de \(AX = B\) est
où \(A_j\) est la matrice \(A\) avec la \(j\)-ème colonne remplacée par \(B\).
Remarque 93
Les formules de Cramer sont élégantes mais coûteuses en calcul (\(O(n!)\)). Le pivot de Gauss est bien plus efficace (\(O(n^3)\)). Cramer est surtout utile en petite dimension ou pour des raisonnements théoriques.
Interprétation géométrique#
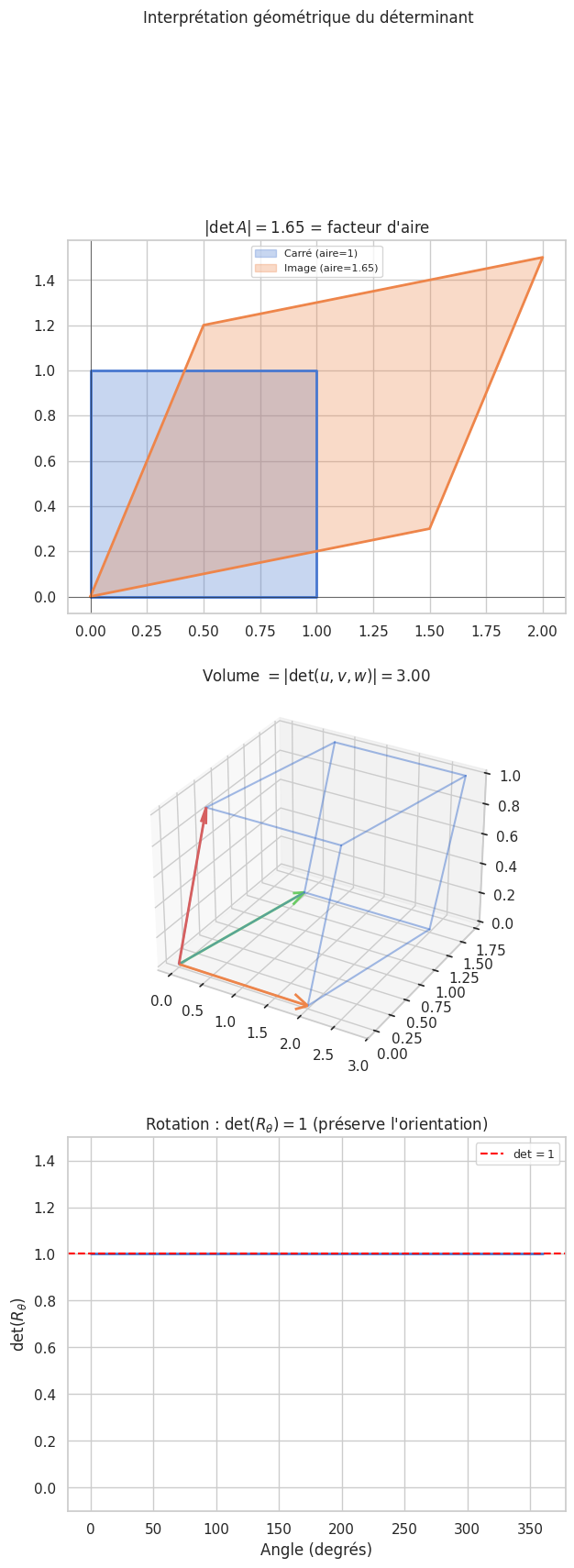
Remarque 94
Le déterminant mesure le volume signé :
Dimension 2 : \(|\det(u,v)|\) = aire du parallélogramme ; le signe indique l’orientation (directe ou indirecte).
Dimension 3 : \(|\det(u,v,w)|\) = volume du parallélépipède.
En général : \(|\det(f)|\) = facteur de dilatation des volumes par \(f\).
Si \(\det(f) > 0\) : \(f\) préserve l’orientation. Si \(\det(f) < 0\) : \(f\) renverse l’orientation.
Déterminant d’un endomorphisme#
Définition 170 (Déterminant d’un endomorphisme)
Le déterminant de \(f \in \mathcal{L}(E)\) est \(\det(f) = \det(\mathrm{Mat}_\mathcal{B}(f))\) pour n’importe quelle base \(\mathcal{B}\) (bien défini car invariant par similitude).
Proposition 257
\(f\) automorphisme \(\iff\) \(\det(f) \neq 0\)
\(\det(g \circ f) = \det(g)\,\det(f)\)
\(\det(\lambda\,\mathrm{id}) = \lambda^n\)
Exemple 89
\(\det(\mathrm{id}) = 1\)
Symétrie : \(\det = -1\) si l’espace est impair, \(\pm 1\) en général
Homothétie \(\lambda\,\mathrm{id}\) : \(\det = \lambda^n\)
Rotation en dimension paire : \(\det = 1\)