Applications linéaires#
L’algèbre est généreuse : elle donne souvent plus qu’on ne lui demande.
— Jean le Rond d’Alembert
Définition et exemples#
Définition 144 (Application linéaire)
Soit \(E\) et \(F\) deux \(\mathbb{K}\)-espaces vectoriels. Une application \(f : E \to F\) est linéaire si
Définition 145 (Vocabulaire)
Nom |
Définition |
|---|---|
Endomorphisme |
\(f \in \mathcal{L}(E, E)\) |
Isomorphisme |
\(f \in \mathcal{L}(E,F)\) bijectif |
Automorphisme |
Endomorphisme bijectif |
Forme linéaire |
\(f \in \mathcal{L}(E, \mathbb{K})\) |
Dual \(E^*\) |
\(\mathcal{L}(E, \mathbb{K})\) |
Proposition 226 (Propriétés immédiates)
Si \(f \in \mathcal{L}(E, F)\) :
\(f(0_E) = 0_F\)
\(f(-u) = -f(u)\)
\(f\!\left(\sum_{k=1}^p \lambda_k v_k\right) = \sum_{k=1}^p \lambda_k f(v_k)\)
Exemple 80
Application |
Linéaire ? |
Remarque |
|---|---|---|
\((x,y) \mapsto (x+y, x-y)\) sur \(\mathbb{R}^2\) |
Oui |
Matrice \(\begin{pmatrix}1&1\\1&-1\end{pmatrix}\) |
\(x \mapsto x + 1\) sur \(\mathbb{R}\) |
Non |
\(f(0) = 1 \neq 0\) |
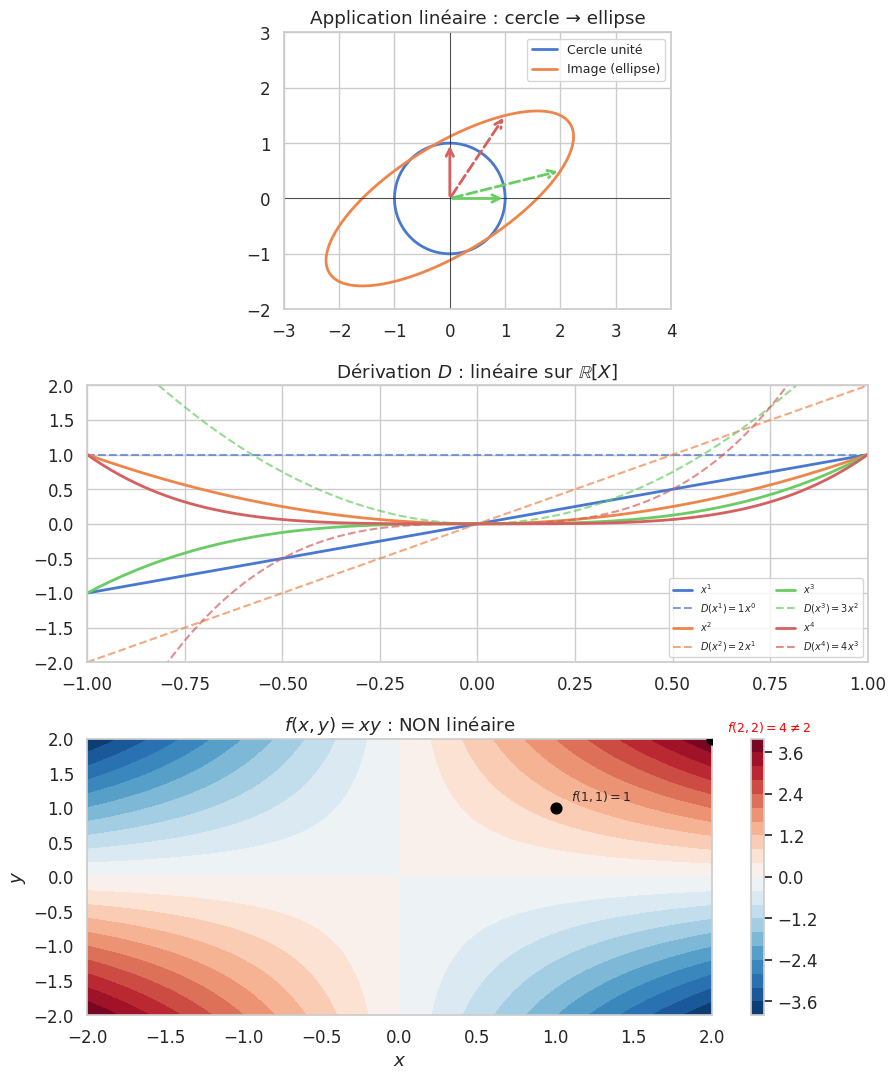
\(f \mapsto f'\) sur \(\mathcal{C}^1(I)\) |
Oui |
Dérivation |
\(f \mapsto \int_a^b f\) sur \(\mathcal{C}^0([a,b])\) |
Oui |
Forme linéaire |
\((x,y) \mapsto xy\) sur \(\mathbb{R}^2\) |
Non |
Pas homogène |
Projection sur \(F\) parallèlement à \(G\) |
Oui |
Si \(E = F \oplus G\) |
Structure de \(\mathcal{L}(E, F)\)#
Proposition 227 (\(\mathcal{L}(E, F)\) est un espace vectoriel)
\((f+g)(u) = f(u)+g(u)\) et \((\lambda f)(u) = \lambda f(u)\) munissent \(\mathcal{L}(E,F)\) d’une structure de \(\mathbb{K}\)-ev.
Proposition 228 (Composition et algèbre)
Si \(f \in \mathcal{L}(E,F)\) et \(g \in \mathcal{L}(F,G)\), alors \(g \circ f \in \mathcal{L}(E,G)\).
\((\mathcal{L}(E), +, \circ)\) est un anneau (non commutatif pour \(\dim E \geq 2\)) d’élément neutre \(\mathrm{id}_E\).
Proposition 229 (Dimension de \(\mathcal{L}(E, F)\))
Si \(\dim E = n\) et \(\dim F = p\) : \(\dim \mathcal{L}(E, F) = np\).
Proof. L’application \(\Phi : f \mapsto \text{Mat}(f)\) (matrice dans des bases fixées) est un isomorphisme \(\mathcal{L}(E,F) \xrightarrow{\sim} \mathcal{M}_{p,n}(\mathbb{K})\), qui est de dimension \(pn\).
Image, noyau, rang#
Définition 146 (Noyau et image)
Pour \(f \in \mathcal{L}(E,F)\) :
\(\ker f\) est un sev de \(E\) et \(\mathrm{Im}\, f\) est un sev de \(F\).
Proof. Noyau. \(0_E \in \ker f\). Si \(u, v \in \ker f\) : \(f(\lambda u + v) = \lambda f(u) + f(v) = 0\). ✓
Image. \(0_F = f(0_E) \in \mathrm{Im}\, f\). Si \(w_i = f(u_i) \in \mathrm{Im}\, f\) : \(\lambda w_1 + w_2 = f(\lambda u_1 + u_2) \in \mathrm{Im}\, f\). ✓
Proposition 230 (Injectivité et noyau)
Proof. \((\Rightarrow)\) Si \(f(u) = 0 = f(0)\), alors \(u = 0\) par injectivité. \((\Leftarrow)\) Si \(f(u) = f(v)\), alors \(f(u-v) = 0\), donc \(u-v \in \ker f = \{0\}\).
Définition 147 (Rang)
Le rang de \(f\) est \(\mathrm{rg}\, f = \dim(\mathrm{Im}\, f)\).
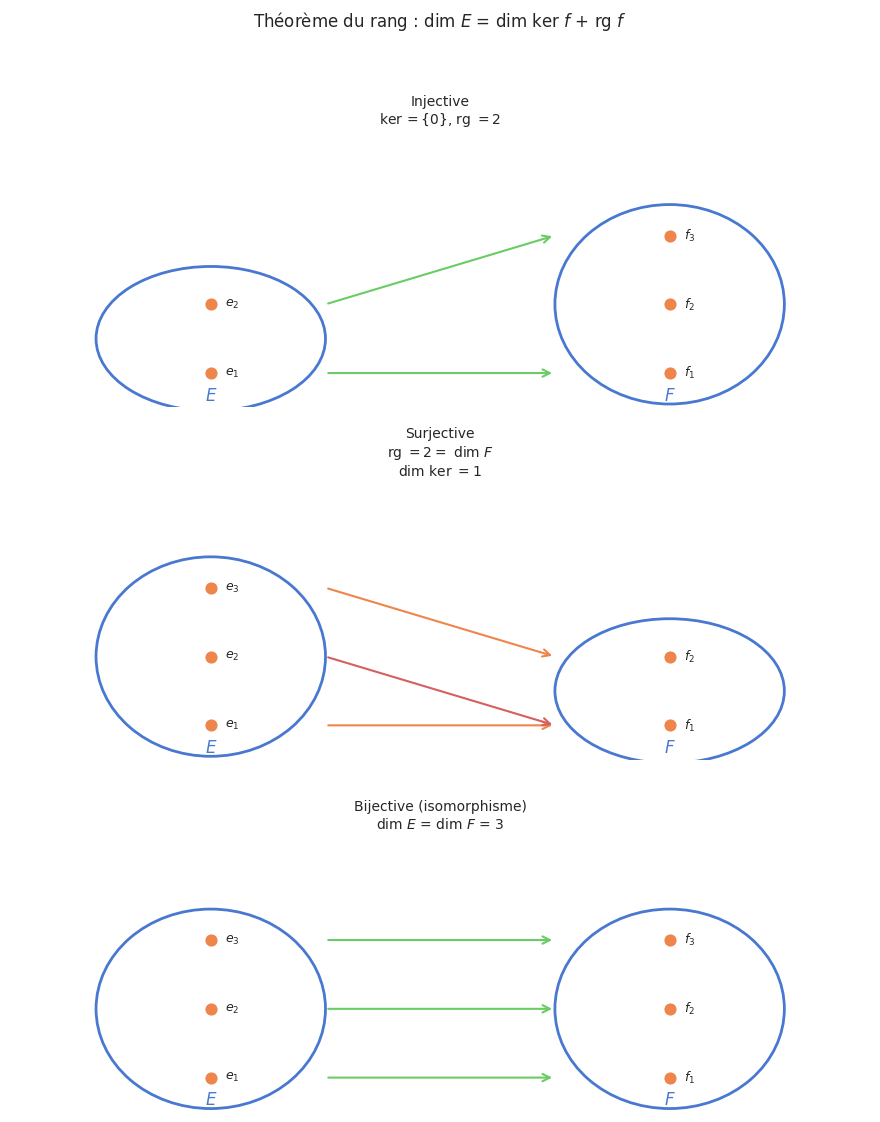
Proposition 231 (Théorème du rang)
Proof. Soit \((e_1, \ldots, e_r)\) base de \(\ker f\), complétée en base \((e_1,\ldots,e_r, e_{r+1},\ldots,e_n)\) de \(E\).
\((f(e_{r+1}), \ldots, f(e_n))\) est une base de \(\mathrm{Im}\, f\).
Génératrice. Pour tout \(u = \sum \lambda_i e_i\), \(f(u) = \sum_{i>r} \lambda_i f(e_i)\) (car \(f(e_i)=0\) pour \(i\leq r\)). ✓
Libre. Si \(\sum_{i>r} \lambda_i f(e_i) = 0\), alors \(f(\sum_{i>r}\lambda_i e_i) = 0\), donc \(\sum_{i>r}\lambda_i e_i \in \ker f = \mathrm{Vect}(e_1,\ldots,e_r)\). Comme \((e_1,\ldots,e_n)\) est libre : \(\lambda_i = 0\). ✓
Donc \(\mathrm{rg}\, f = n - r\).
Proposition 232 (Corollaires du théorème du rang)
Soit \(f \in \mathcal{L}(E,F)\) avec \(\dim E = n\), \(\dim F = p\).
Propriété |
Condition |
|---|---|
\(f\) injective |
\(\ker f = \{0\}\), i.e. \(\mathrm{rg}\, f = n\) |
\(f\) surjective |
\(\mathrm{Im}\, f = F\), i.e. \(\mathrm{rg}\, f = p\) |
\(f\) bijective (isomorphisme) |
\(\mathrm{rg}\, f = n = p\) |
Borne sur le rang |
\(\mathrm{rg}\, f \leq \min(n,p)\) |
En dimension finie égale (\(n = p\)) : injective \(\iff\) surjective \(\iff\) bijective.
Détermination par l’image d’une base#
Proposition 233 (Théorème de détermination)
Soit \((e_1, \ldots, e_n)\) une base de \(E\) et \(w_1, \ldots, w_n \in F\) quelconques. Il existe une unique \(f \in \mathcal{L}(E,F)\) telle que \(f(e_i) = w_i\) pour tout \(i\).
Proof. Existence. \(f\!\left(\sum \lambda_i e_i\right) = \sum \lambda_i w_i\) est bien définie (coordonnées uniques) et linéaire. ✓
Unicité. Si \(g \in \mathcal{L}(E,F)\) vérifie \(g(e_i) = w_i\), alors pour tout \(u = \sum\lambda_i e_i\) : \(g(u) = \sum \lambda_i w_i = f(u)\). ✓
Remarque 88
Ce théorème est fondamental : pour définir une application linéaire sur \(E\), il suffit de choisir librement les images des vecteurs d’une base. C’est ainsi que l’on construit tous les isomorphismes.
Proposition 234 (Isomorphisme et dimension)
\(E \simeq F \iff \dim E = \dim F\).
En particulier, tout ev de dimension \(n\) est isomorphe à \(\mathbb{K}^n\).
Projecteurs et symétries#
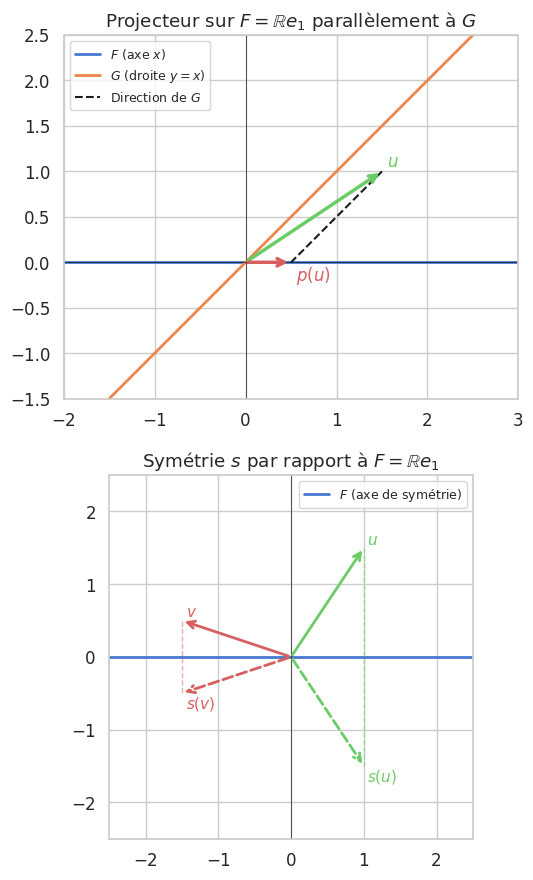
Définition 148 (Projecteur)
Soit \(E = F \oplus G\). Le projecteur sur \(F\) parallèlement à \(G\) est
Proposition 235 (Caractérisation des projecteurs)
\(p \in \mathcal{L}(E)\) est un projecteur \(\iff\) \(p^2 = p\) (idempotent).
Dans ce cas : \(\mathrm{Im}\, p = \ker(p - \mathrm{id})\) et \(\ker p = \mathrm{Im}(\mathrm{id} - p)\), avec \(E = \mathrm{Im}\, p \oplus \ker p\).
Proof. \((\Rightarrow)\) Si \(u = u_F + u_G\) : \(p^2(u) = p(u_F) = u_F = p(u)\) (car \(u_F \in F\)). ✓
\((\Leftarrow)\) Pour \(u \in E\) : \(u = p(u) + (u - p(u))\). On a \(p(u) \in \mathrm{Im}\, p\) et \(p(u - p(u)) = p(u) - p^2(u) = 0\), donc \(u - p(u) \in \ker p\). Si \(v \in \mathrm{Im}\, p \cap \ker p\) : \(v = p(w)\) et \(p(v) = 0\), d’où \(v = p^2(w) = p(v) = 0\).
Définition 149 (Symétrie)
La symétrie par rapport à \(F\) parallèlement à \(G\) est \(s = 2p - \mathrm{id}\) :
\(s\) est une involution : \(s^2 = \mathrm{id}\). Valeurs propres : \(+1\) (sur \(F\)) et \(-1\) (sur \(G\)).
Formes linéaires et hyperplans#
Définition 150 (Hyperplan)
Un hyperplan de \(E\) est un sev de dimension \(\dim E - 1\), i.e. le noyau d’une forme linéaire non nulle.
Exemple 81
Dans \(\mathbb{R}^3\) : les plans passant par l’origine \(ax + by + cz = 0\) sont les hyperplans.
Dans \(\mathbb{R}^n\) : \(H = \{(x_1,\ldots,x_n) \mid \sum a_i x_i = 0\}\).
\(\ker D\) (polynômes de dérivée nulle) = polynômes constants dans \(\mathbb{R}_n[X]\).
Proposition 236
Deux formes linéaires \(\varphi, \psi \in E^*\) ont même noyau \(\iff\) elles sont proportionnelles : \(\psi = \lambda \varphi\) pour un \(\lambda \in \mathbb{K}\).
Proof. \((\Leftarrow)\) Immédiat. \((\Rightarrow)\) Soit \(u_0 \notin H = \ker\varphi\). Tout \(u \in E\) s’écrit \(u = \lambda u_0 + v\) avec \(v \in H\) (car \(E = \mathbb{K}u_0 \oplus H\)). Alors \(\varphi(u) = \lambda\varphi(u_0)\) et \(\psi(u) = \lambda\psi(u_0)\). D’où \(\psi = \frac{\psi(u_0)}{\varphi(u_0)}\varphi\).
Endomorphismes remarquables#
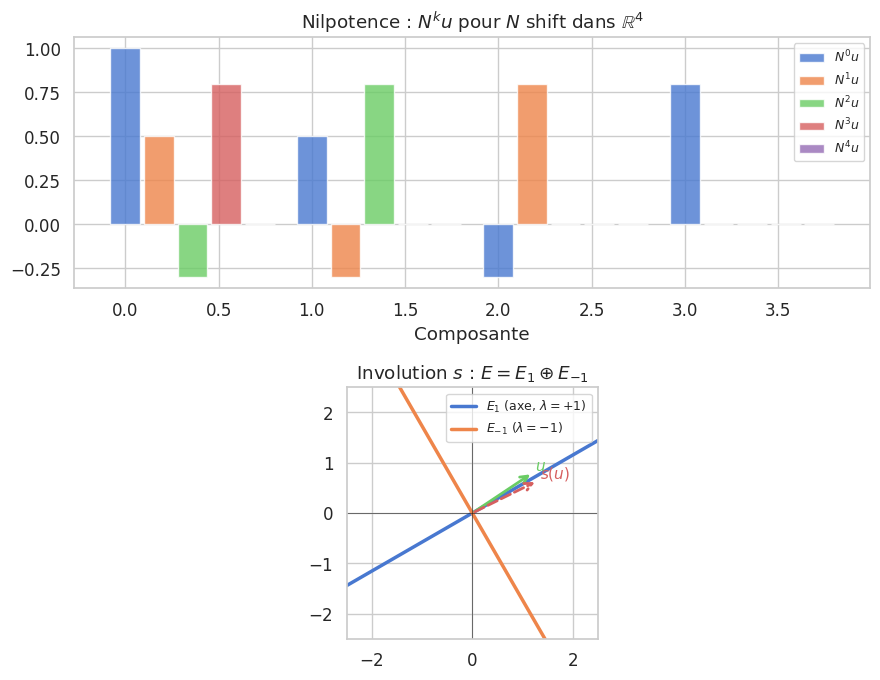
Définition 151 (Nilpotent)
\(f \in \mathcal{L}(E)\) est nilpotent d’indice \(k\) si \(f^k = 0\) et \(f^{k-1} \neq 0\).
Propriété clé. Si \(f\) est nilpotent d’indice \(k\) sur un ev de dimension \(n\), alors \(k \leq n\).
Proof. La chaîne \(E \supset \mathrm{Im}\, f \supset \mathrm{Im}\, f^2 \supset \cdots \supset \mathrm{Im}\, f^k = \{0\}\) est strictement décroissante (jusqu’à l’indice \(k\)), donc chaque inclusion diminue la dimension d’au moins 1. Ainsi \(k \leq n\).
Exemple 82
Sur \(\mathbb{R}_n[X]\), la dérivation \(D\) est nilpotente d’indice \(n+1\) : \(D^{n+1} = 0\).
La matrice \(N = \begin{pmatrix} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & 0 \end{pmatrix}\) est nilpotente d’indice 3 : \(N^2 \neq 0\), \(N^3 = 0\).
Définition 152 (Involution)
\(f\) est une involution si \(f^2 = \mathrm{id}\).
Caractérisation. \(f\) est une involution \(\iff\) \(f\) est une symétrie. Dans ce cas : \(E = E_1 \oplus E_{-1}\) (valeurs propres \(\pm 1\)), où \(E_{\pm 1} = \ker(f \mp \mathrm{id})\).
Théorèmes d’isomorphisme#
Proposition 237 (Premier théorème d’isomorphisme)
Soit \(f \in \mathcal{L}(E, F)\). L’application \(\bar{f} : E/\ker f \to \mathrm{Im}\, f\) définie par \(\bar{f}(u + \ker f) = f(u)\) est un isomorphisme :
En particulier, \(\dim(E/\ker f) = \mathrm{rg}\, f\).
Proof. \(\bar{f}\) est bien définie (si \(u - v \in \ker f\), \(f(u) = f(v)\)), linéaire, injective (si \(\bar{f}(u+\ker f) = 0\), \(u \in \ker f\)), et surjective sur \(\mathrm{Im}\, f\).
Remarque 89
L’espace quotient \(E/\ker f\) est l’espace des classes \(u + \ker f = \{u + v \mid v \in \ker f\}\). C’est l’analogue vectoriel du théorème d’isomorphisme des groupes (\(G/\ker\phi \simeq \mathrm{Im}\,\phi\), cf. chapitre 03).