Matrices#
Les matrices sont le langage universel des transformations linéaires.
— Arthur Cayley
Définitions#
Définition 153 (Matrice)
Une matrice \(A \in \mathcal{M}_{n,p}(\mathbb{K})\) est un tableau \((a_{ij})_{\substack{1\leq i\leq n\\1\leq j\leq p}}\) de scalaires.
\(\mathcal{M}_n(\mathbb{K}) = \mathcal{M}_{n,n}(\mathbb{K})\) désigne les matrices carrées d’ordre \(n\).
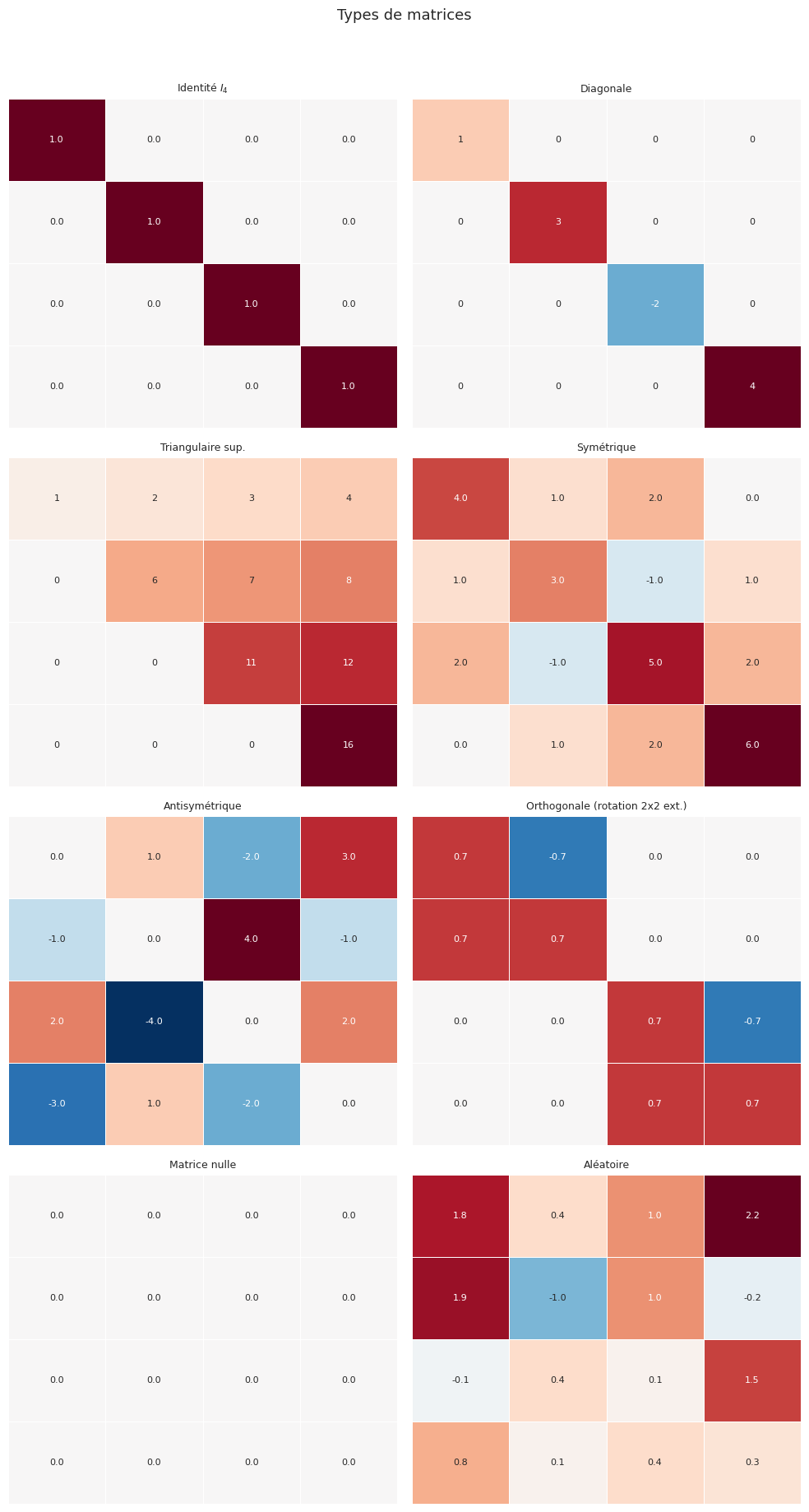
Définition 154 (Matrices particulières)
Nom |
Condition |
|---|---|
Nulle \(0_{n,p}\) |
\(a_{ij} = 0\) pour tout \(i,j\) |
Identité \(I_n\) |
\(a_{ii} = 1\), \(a_{ij} = 0\) si \(i\neq j\) |
Diagonale |
\(a_{ij} = 0\) si \(i \neq j\) |
Triangulaire sup. |
\(a_{ij} = 0\) si \(i > j\) |
Triangulaire inf. |
\(a_{ij} = 0\) si \(i < j\) |
Symétrique |
\(A = A^T\) |
Antisymétrique |
\(A = -A^T\) |
Orthogonale |
\(A^T A = I_n\) (et \(A \in GL_n(\mathbb{R})\)) |
Opérations matricielles#
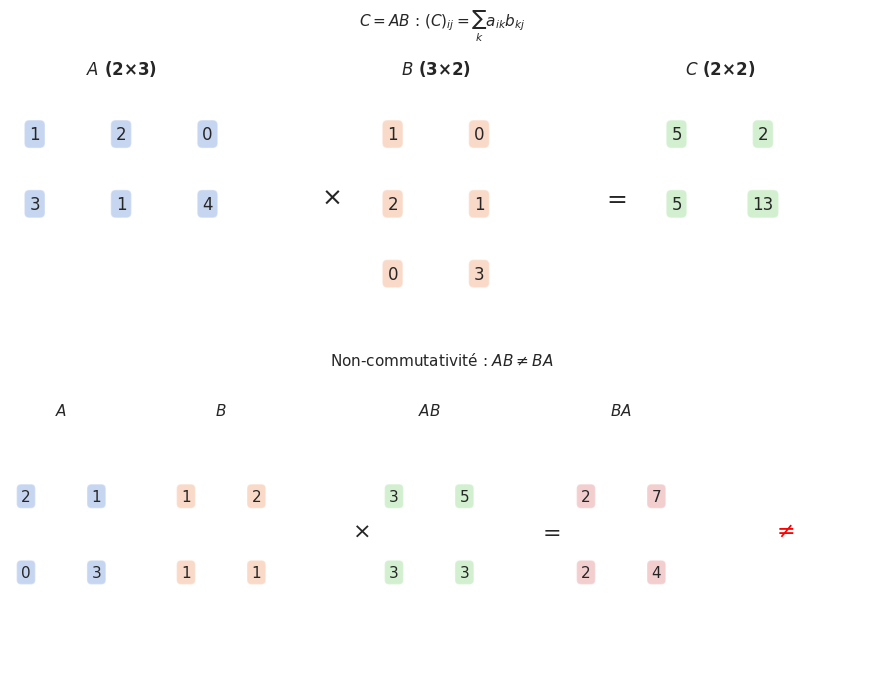
Définition 155 (Produit matriciel)
Le produit \(AB\) de \(A \in \mathcal{M}_{n,p}\) et \(B \in \mathcal{M}_{p,q}\) est la matrice \(C \in \mathcal{M}_{n,q}\) définie par
Le coefficient \((i,j)\) est le produit scalaire de la \(i\)-ème ligne de \(A\) par la \(j\)-ème colonne de \(B\).
Proposition 238 (Propriétés du produit)
Associatif : \((AB)C = A(BC)\)
Distributif à gauche et à droite
Élément neutre : \(I_n A = A I_p = A\)
Non commutatif en général : \(AB \neq BA\)
Diviseurs de zéro possibles : \(AB = 0\) n’implique pas \(A = 0\) ou \(B = 0\)
Exemple 83
\(\begin{pmatrix}1&0\\0&0\end{pmatrix}\begin{pmatrix}0&1\\0&0\end{pmatrix} = \begin{pmatrix}0&1\\0&0\end{pmatrix}\) mais \(\begin{pmatrix}0&1\\0&0\end{pmatrix}\begin{pmatrix}1&0\\0&0\end{pmatrix} = \begin{pmatrix}0&0\\0&0\end{pmatrix}\).
Proposition 239 (Transposée)
\((A^T)_{ij} = a_{ji}\). Propriétés :
\((A+B)^T = A^T + B^T\)
\((AB)^T = B^T A^T\)
\((A^T)^T = A\)
Matrice d’une application linéaire#
Définition 156 (Matrice d’une application linéaire)
Soit \(\mathcal{B} = (e_1,\ldots,e_n)\) base de \(E\) et \(\mathcal{B}' = (f_1,\ldots,f_p)\) base de \(F\). La matrice de \(f \in \mathcal{L}(E,F)\) dans \((\mathcal{B}, \mathcal{B}')\) est \(A = \mathrm{Mat}_{\mathcal{B},\mathcal{B}'}(f) \in \mathcal{M}_{p,n}(\mathbb{K})\) où la \(j\)-ème colonne contient les coordonnées de \(f(e_j)\) dans \(\mathcal{B}'\) :
Proposition 240 (Action par multiplication)
L’application \(f \mapsto \mathrm{Mat}(f)\) est un isomorphisme \(\mathcal{L}(E,F) \xrightarrow{\sim} \mathcal{M}_{p,n}(\mathbb{K})\) compatible avec la composition :
Exemple 84
Dérivation \(D : \mathbb{R}_3[X] \to \mathbb{R}_3[X]\) dans la base \((1, X, X^2, X^3)\) :
C’est une matrice nilpotente : \(\mathrm{Mat}(D)^4 = 0\).
Matrices inversibles et groupe linéaire#
Définition 157 (Matrice inversible)
\(A \in \mathcal{M}_n(\mathbb{K})\) est inversible s’il existe \(B\) tel que \(AB = BA = I_n\). Alors \(B = A^{-1}\) est unique.
L’ensemble \(GL_n(\mathbb{K})\) des matrices inversibles forme un groupe pour le produit (non abélien pour \(n \geq 2\)).
Proposition 241 (Caractérisations de l’inversibilité)
Pour \(A \in \mathcal{M}_n(\mathbb{K})\), les assertions suivantes sont équivalentes :
\(A \in GL_n(\mathbb{K})\)
\(\mathrm{rg}\, A = n\)
\(AX = 0 \Rightarrow X = 0\)
\(\forall B\), le système \(AX = B\) a une unique solution
Les colonnes de \(A\) forment une base de \(\mathbb{K}^n\)
\(\det A \neq 0\) (voir chapitre suivant)
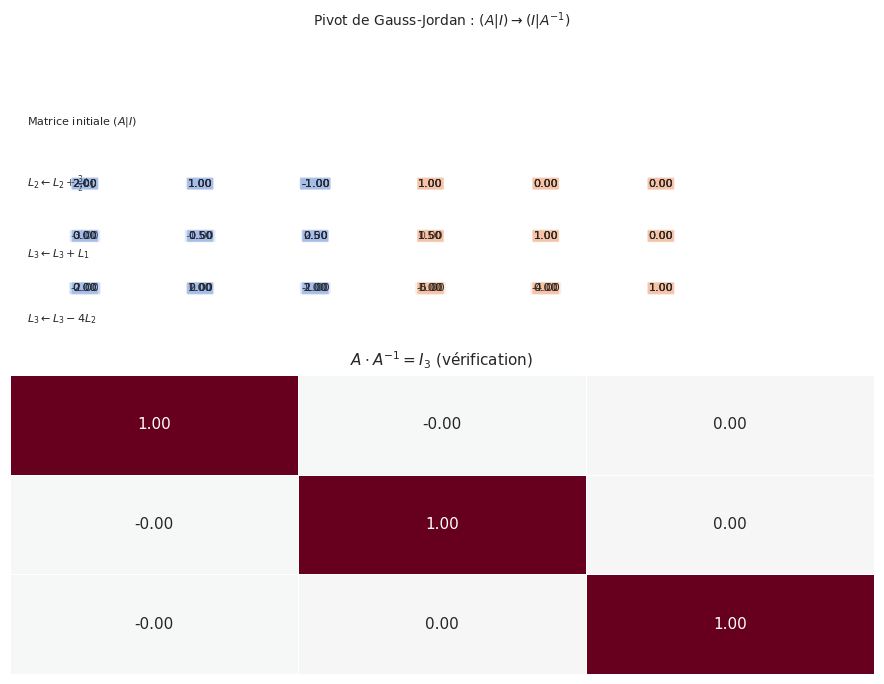
Proposition 242 (Calcul de l’inverse par la méthode de Gauss-Jordan)
On échelonne la matrice augmentée \((A \mid I_n)\) vers \((I_n \mid A^{-1})\) par opérations élémentaires sur les lignes.
Systèmes linéaires#
Définition 158 (Système linéaire)
\(AX = B\) avec \(A \in \mathcal{M}_{n,p}\), \(X \in \mathcal{M}_{p,1}\), \(B \in \mathcal{M}_{n,1}\).
Proposition 243 (Structure des solutions)
L’ensemble des solutions de \(AX = B\) est :
\(\emptyset\) si \(\mathrm{rg}(A) \neq \mathrm{rg}(A|B)\) (système incompatible)
\(X_0 + \ker A\) (sous-espace affine de dimension \(p - \mathrm{rg}\, A\)) sinon
où \(X_0\) est une solution particulière quelconque.
Remarque 90
Théorème de Rouché-Fontené. Le système \(AX = B\) est compatible \(\iff\) \(\mathrm{rg}(A) = \mathrm{rg}(A|B)\).
Si compatible, l’ensemble des solutions est un espace affine de dimension \(p - \mathrm{rg}(A)\).
Exemple 85
Pivot de Gauss :
Après échelonnement :
Remontée : \(z=1\), \(y=1\), \(x=1\). Solution unique \((1,1,1)\).
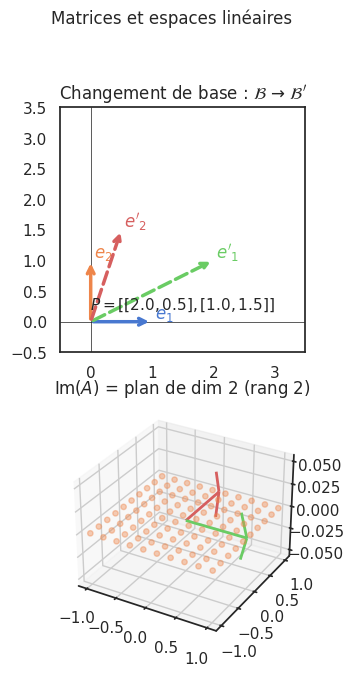
Changement de base#
Définition 159 (Matrice de passage)
La matrice de passage \(P\) de la base \(\mathcal{B}\) à \(\mathcal{B}'\) a pour \(j\)-ème colonne les coordonnées de \(e'_j\) dans \(\mathcal{B}\).
\(P\) est inversible. Si \(X\) et \(X'\) sont les coordonnées d’un même vecteur dans \(\mathcal{B}\) et \(\mathcal{B}'\) :
Proposition 244 (Formule de changement de base)
Définition 160 (Matrices semblables)
\(A\) et \(B\) sont semblables s’il existe \(P \in GL_n\) tel que \(B = P^{-1}AP\).
La semblabilité est une relation d’équivalence. Invariants : rang, trace, déterminant, polynôme caractéristique, valeurs propres.
Trace et invariants#
Définition 161 (Trace)
\(\mathrm{tr}(A) = \sum_{i=1}^n a_{ii}\).
Proposition 245 (Propriétés de la trace)
Linéaire
\(\mathrm{tr}(AB) = \mathrm{tr}(BA)\) (mais \(AB \neq BA\) en général)
\(\mathrm{tr}(P^{-1}AP) = \mathrm{tr}(A)\) (invariant par similitude)
Proof. \(\mathrm{tr}(AB) = \sum_i (AB)_{ii} = \sum_i \sum_k a_{ik}b_{ki} = \sum_k \sum_i b_{ki}a_{ik} = \mathrm{tr}(BA)\).
Opérations élémentaires et pivot de Gauss#
Définition 162 (Matrices élémentaires)
Les opérations élémentaires sur les lignes correspondent à la multiplication à gauche par des matrices inversibles :
Opération |
Matrice |
|---|---|
\(L_i \leftrightarrow L_j\) |
\(E_{ij}\) (permutation) |
\(L_i \leftarrow \lambda L_i\) |
\(D_i(\lambda)\) (dilatation) |
\(L_i \leftarrow L_i + \lambda L_j\) |
\(T_{ij}(\lambda)\) (transvection) |
Proposition 246 (Forme échelonnée réduite)
Toute matrice \(A\) peut être mise sous forme échelonnée réduite (RREF) par des opérations élémentaires : matrice avec des pivots \(1\) et des zéros au-dessus et en dessous.
La RREF est unique et permet de lire le rang, le noyau, et l’image.
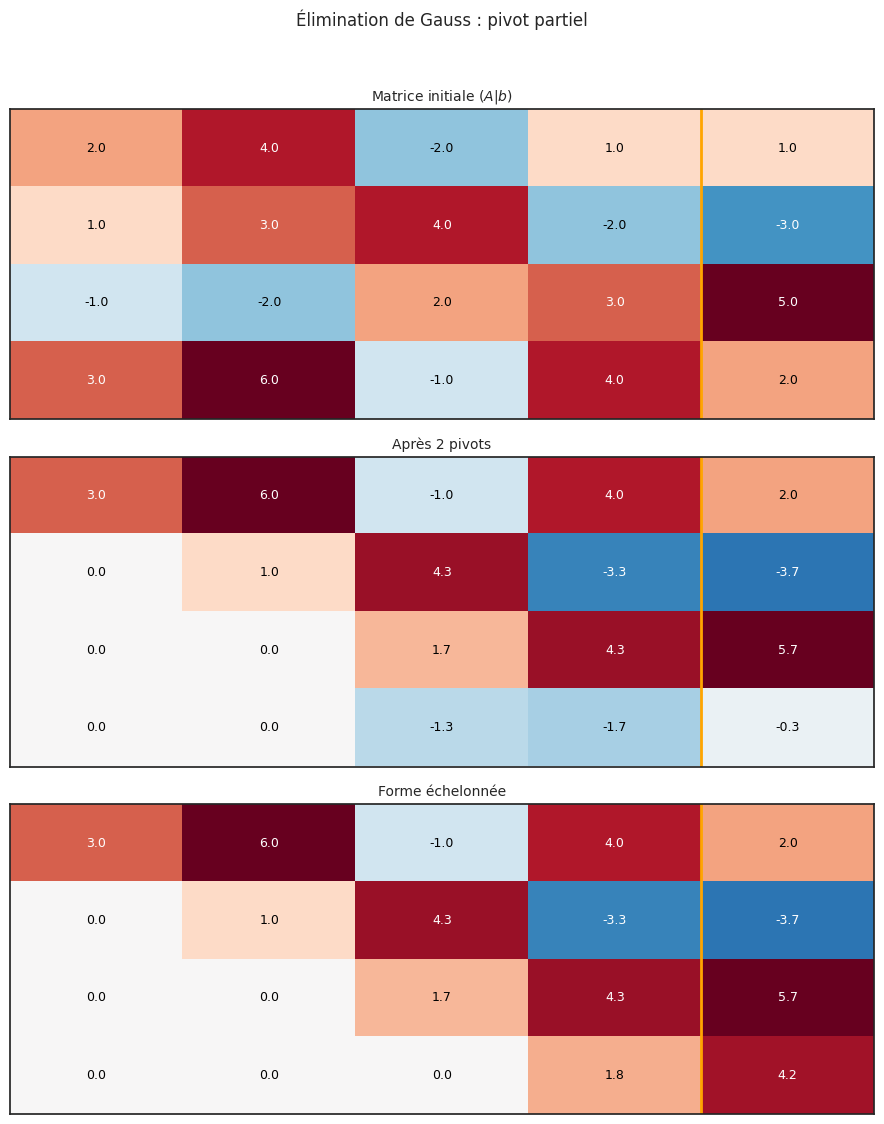
Solution : x = [-34.6667 15.6667 -2.6667 2.3333]
Vérification Ax = [ 1. -3. 5. 2.], b = [ 1. -3. 5. 2.]
Matrices par blocs#
Définition 163 (Matrice par blocs)
Une matrice peut être partitionnée en sous-matrices (blocs) :
Le produit par blocs suit la même règle que le produit matriciel ordinaire, si les dimensions sont compatibles.
Proposition 247 (Inversibilité et blocs diagonaux)
Si \(A = \begin{pmatrix} B & 0 \\ 0 & C \end{pmatrix}\), alors \(A\) est inversible \(\iff\) \(B\) et \(C\) sont inversibles, et \(A^{-1} = \begin{pmatrix} B^{-1} & 0 \\ 0 & C^{-1} \end{pmatrix}\).
Exemple 86
Soit \(A = \begin{pmatrix} 2 & 1 & 0 & 0 \\ 3 & 4 & 0 & 0 \\ 0 & 0 & 1 & 2 \\ 0 & 0 & 3 & 5 \end{pmatrix}\). Alors \(\det A = \det\begin{pmatrix}2&1\\3&4\end{pmatrix} \cdot \det\begin{pmatrix}1&2\\3&5\end{pmatrix} = 5 \cdot (-1) = -5\).